孔洞指的是被前景像素点或者说感兴趣的像素点包围起来的区域,这个区域是我们不感兴趣的背景区域。
数字图像处理的孔洞填充的公式为:

I 为前景像素 ,c 为补集
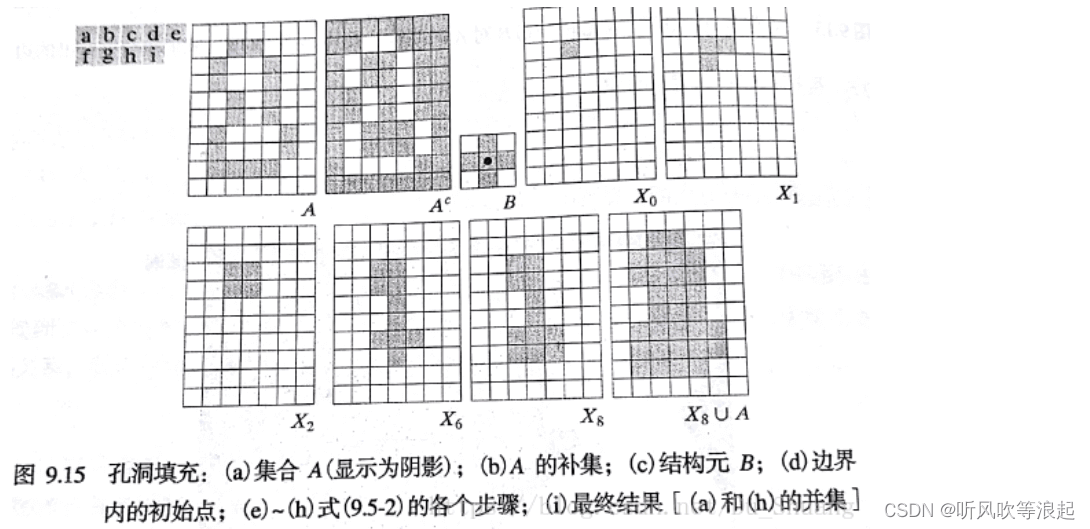
其实孔洞填充的步骤就是一个迭代的过程:
先设置一个填充的起始点,需要在孔洞的内部。如d图所示,然后被结构元B(图c)膨胀。
然后,为了将膨胀的结果限制在孔洞内部,需要和原图(图a)的补集(图b)相交(图e),因为如果不控制膨胀的结果的话,那么膨胀会填充整个区域,而膨胀结果和原图的补集相交,会使结果限制到我们感兴趣的区域内部,也就是孔洞。
其次,重复这个过程,直到第k步和第k+1的步骤结果相同,那么我们可以认为孔洞已经被填充完毕(图h)
最后,和原图相加即可(图i)
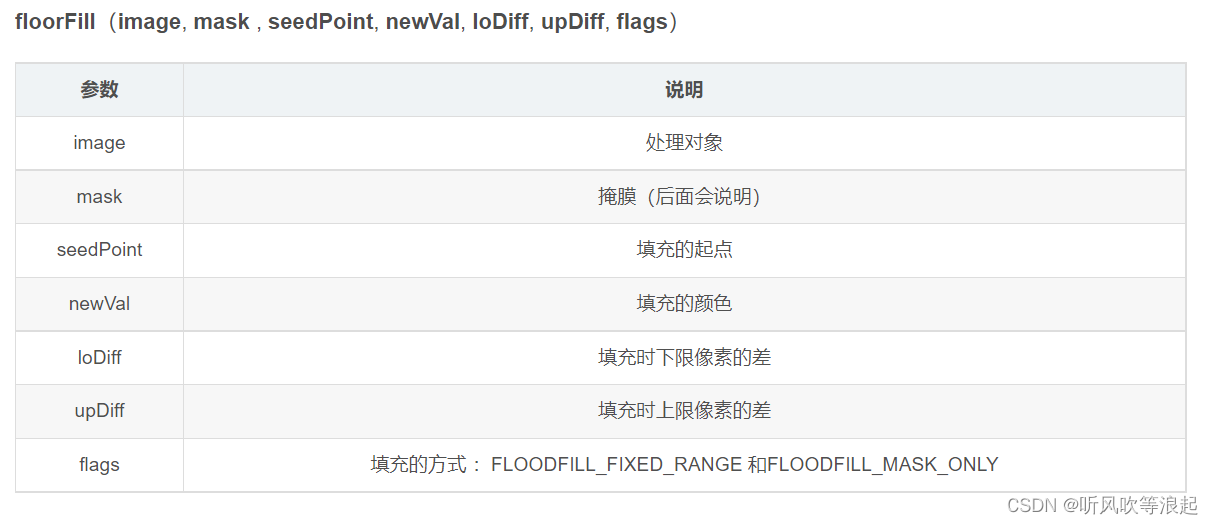
注:这里的mask必须为图像长宽+2,且类型要是uint8
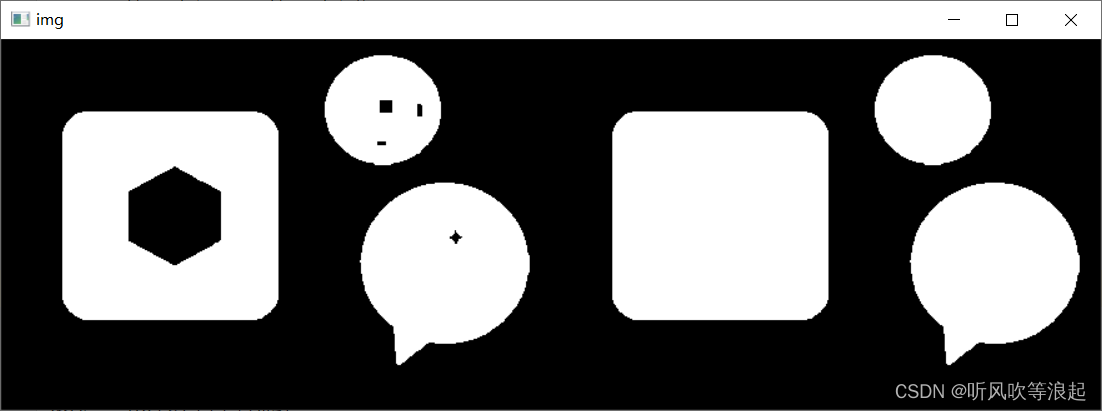
我们对下面图像做孔洞填充

# -*- coding: utf-8 -*-
import cv2
import numpy as np
def holefill(img):
img_copy = img.copy()
mask = np.zeros((img.shape[0]+2,img.shape[1]+2),dtype=np.uint8)
cv2.floodFill(img,mask,(0,0),255)
img_inverse = cv2.bitwise_not(img)
dst = cv2.bitwise_or(img_copy,img_inverse)
return dst
img = cv2.imread('hole.png',0)
thresh , img = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
img_copy =img.copy()
dst = holefill(img)
cv2.imshow('img',np.hstack((img_copy,dst)))
cv2.waitKey()
cv2.destroyAllWindows()处理的结果为
代码详解:
1. 首先将图像进行二值化处理,转为二值图像
2. 通过图像的长和宽设置掩膜mask,类型为uint8
3. floodFill 会对原图像进行操作,所以事先需要拷贝图像,将漫水的种子设为(0,0)也就是图像的左上角,填充的颜色为255。虽然通过计算找到孔洞的位置,然后直接填充就可以,但是这样比较麻烦,且孔洞较多的时候不好处理。这里我们将除了 前景像素点和孔洞 的位置都填充为前景像素点,然后通过求反就可以得到所有的孔洞的位置
4. 最后将孔洞和原图相加即可

