道格拉斯-普克算法(Douglas–Peucker algorithm,亦称为拉默-道格拉斯-普克算法、迭代适应点算法、分裂与合并算法)是将曲线近似表示为一系列点,并减少点的数量的一种算法。它的优点是具有平移和旋转不变性,给定曲线与阈值后,抽样结果一定。
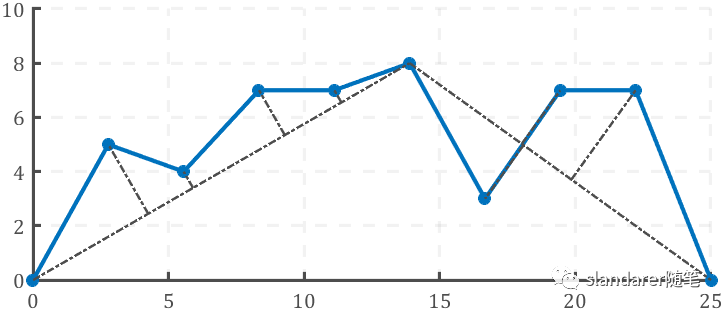
1.在曲线首尾两点间虚连一条直线,求出其余各点到该直线的距离。
2.选其最大者与阈值相比较,若大于阈值,则离该直线距离最大的点保留,否则将直线两端点间各点全部舍去。
3.依据所保留的点,将已知曲线分成两部分处理,重复第1、2步操作,迭代操作,即仍选距离最大者与阈值比较,依次取舍,直到无点可舍去,最后得到满足给定精度限差的曲线点坐标。
Long Time Later
为了代码简单易理解,这里使用了二分迭代,含详细注释代码如下(代码片可左右滑动)。
function nPntSet=dp(pntSet,TH)
% @author : slandarer
% pntSet : 二维数据点
% TH : 距离阈值
% 向量运算:计算所有点到首位两点连线距离
vertV=[pntSet(end,2)-pntSet(1,2),-pntSet(end,1)+pntSet(1,1)];
baseL=abs(sum((pntSet-pntSet(1,:)).*vertV./norm(vertV),2));
if max(baseL)<TH
% 若距离小于阈值则返回首尾点
nPntSet=[pntSet(1,:);pntSet(end,:)];
else
% 若距离大于阈值则左右两分支分别计算后拼接
maxPos=find(baseL==max(baseL));maxPos=maxPos(1);
L_PntSet=pntSet(1:maxPos,:);nL_PntSet=dp(L_PntSet,TH);
R_PntSet=pntSet(maxPos:end,:);nR_PntSet=dp(R_PntSet,TH);
nPntSet=[nL_PntSet;nR_PntSet(2:end,:)];
end
end给个demo:
% 构造一组数据
X=linspace(0,25,10)';
Y=randi([0,10],[10,1]);
pntSet=[X,Y];
% 阈值为2的dp算法
nPntSet=dp(pntSet,2);
% 坐标区域修饰
hold on
grid on
ax=gca;
ax.YLim=[0,10];
ax.DataAspectRatio=[1,1,1];
ax.Color=[1,1,1];
ax.XColor=[1,1,1].*.3;
ax.YColor=[1,1,1].*.3;
ax.LineWidth=1.5;
ax.FontName='cambria';
ax.GridLineStyle='--';
% 绘制原始数据曲线
plot(pntSet(:,1),pntSet(:,2),'Color',[0 0.4470 0.7410],'LineWidth',2,'Marker','*');
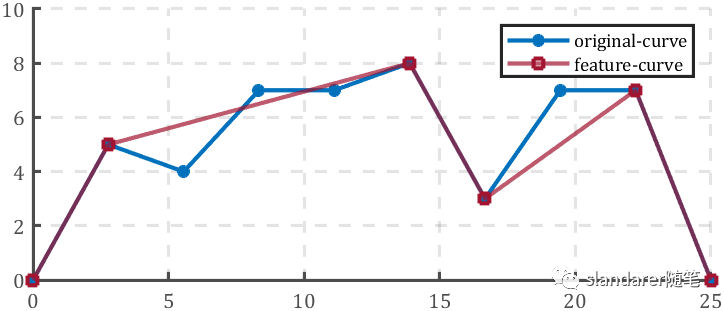
% 绘制新数据曲线
plot(nPntSet(:,1),nPntSet(:,2),'Color',[0.6350 0.0780 0.1840 .7],'LineWidth',2,'Marker','s');
legend('original-curve','feature-curve')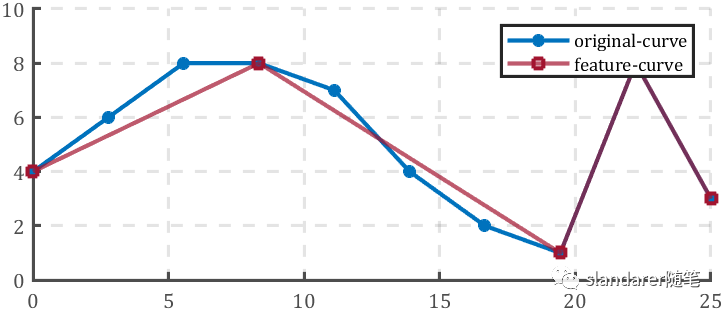
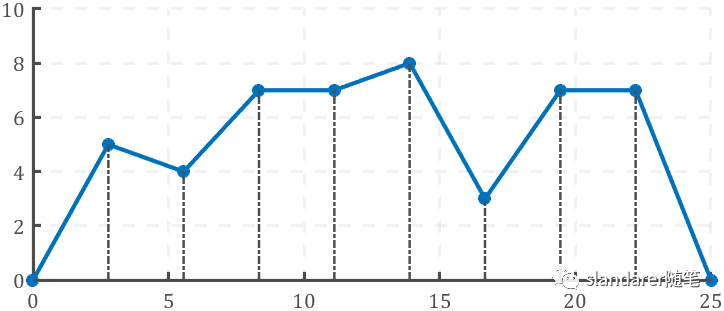
对比与垂距法(Matlab利用垂距法实现提取离散坐标数据特征点),道格拉斯-普克算法(dp)不会出现下面这种情况,即虽然每次变化都不大,但是连着好几次相同方向变化导致某些特征不会被提取出来:
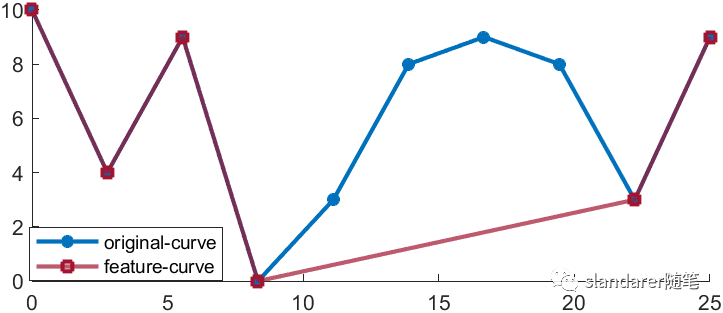
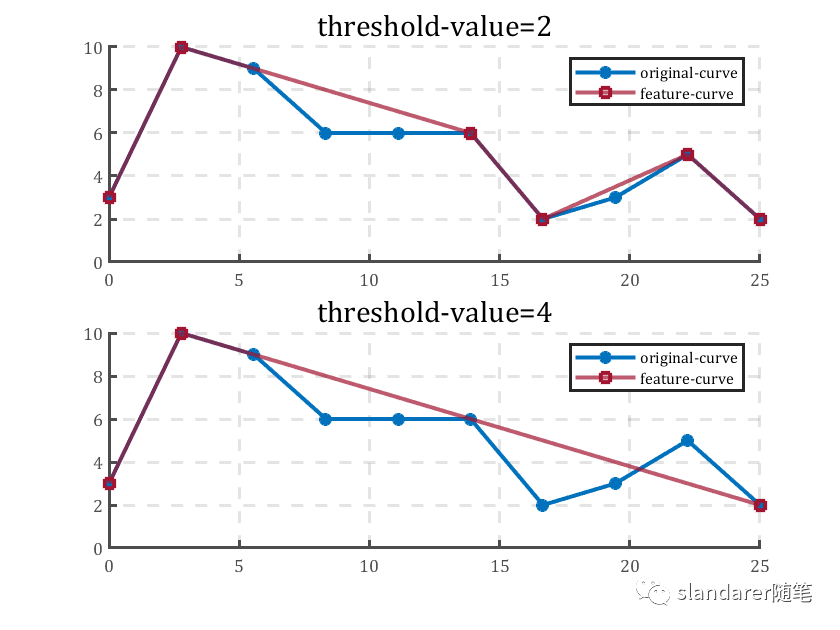
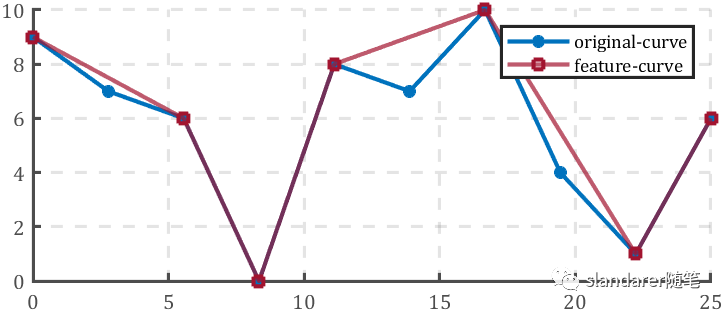
但比较让人头疼的是,阈值需要自己选取,以下是不同阈值时对比图像: