毫米波通常采用线性调频信号(LFMW)。
1. 线性调频信号
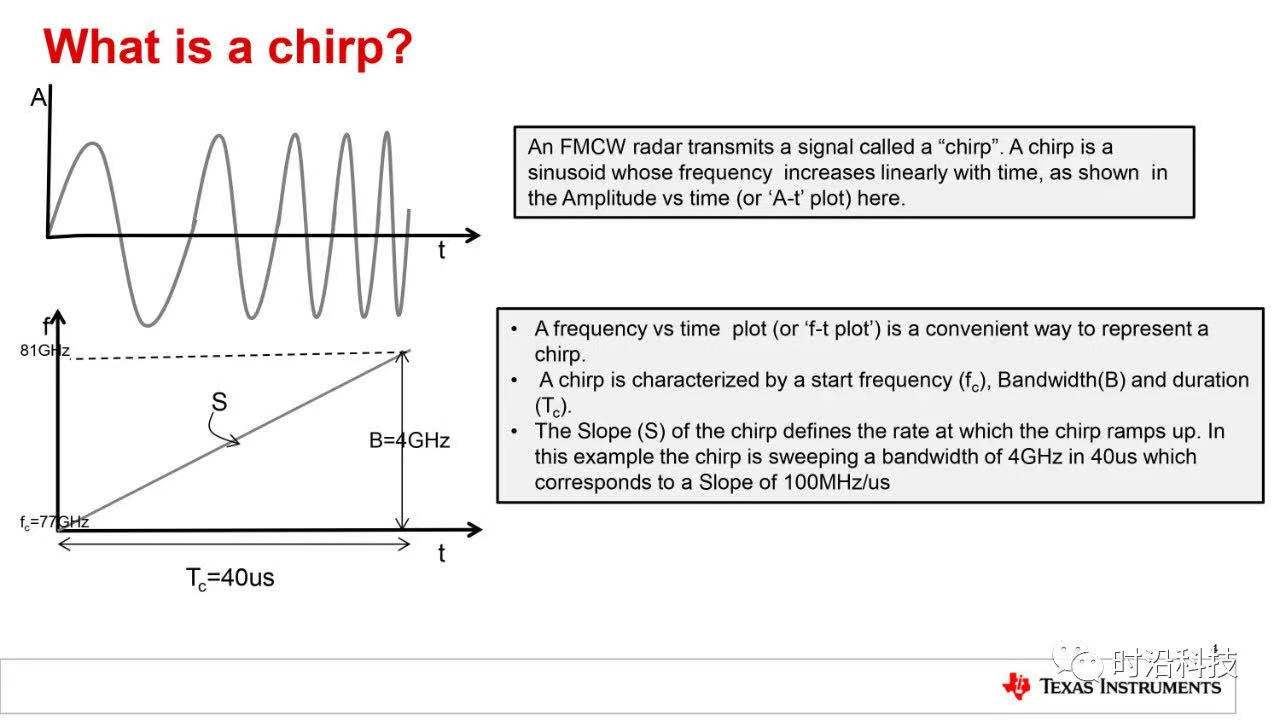
如上图所示,在时域中,线性调频信号为"chirp"信号,在时频图中,频率随着时间线性变化。频率从fc变化到fd,斜率为S.持续周期为Tc。
2. 1T1R FMCW雷达系统工作原理
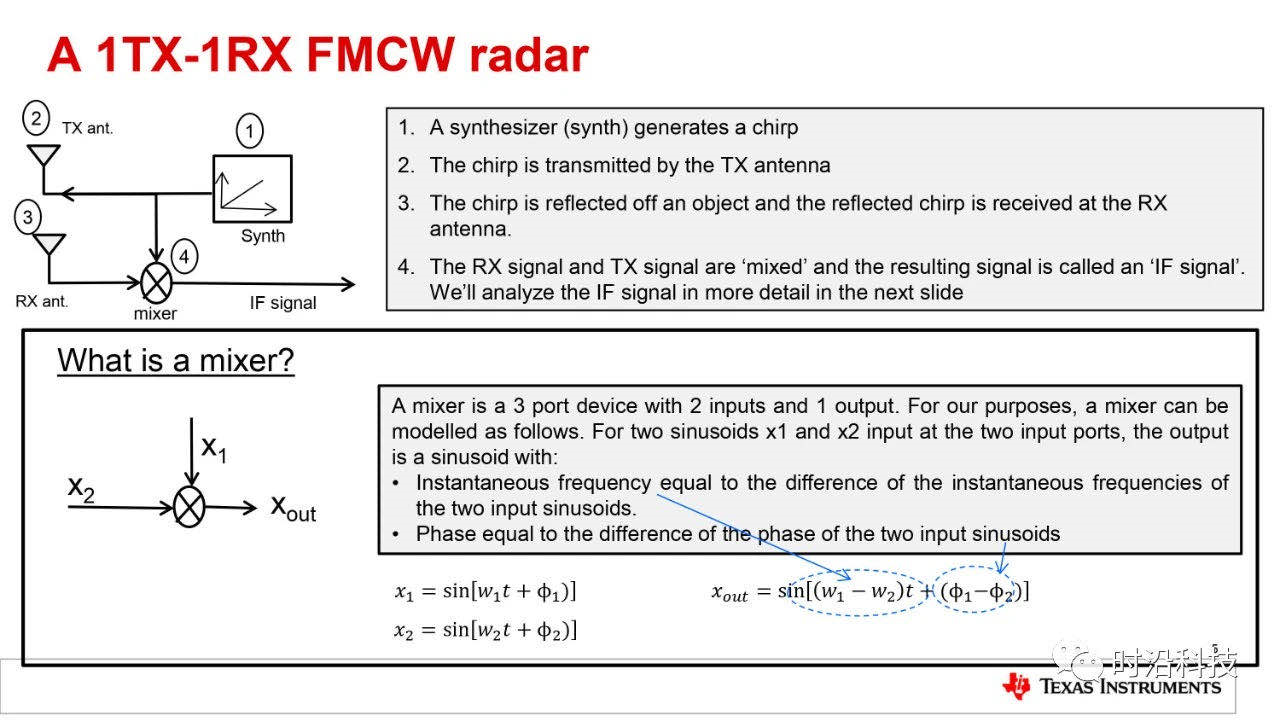
如上图所示,毫米波系统与穿墙雷达硬件系统比较一致。发射信号通过功分器分为两路,一路通过发射天线发射出去,另外一路传输到混频器,与接收信号混频。混频得到差拍中频(IF)信号。
3. 关于IF信号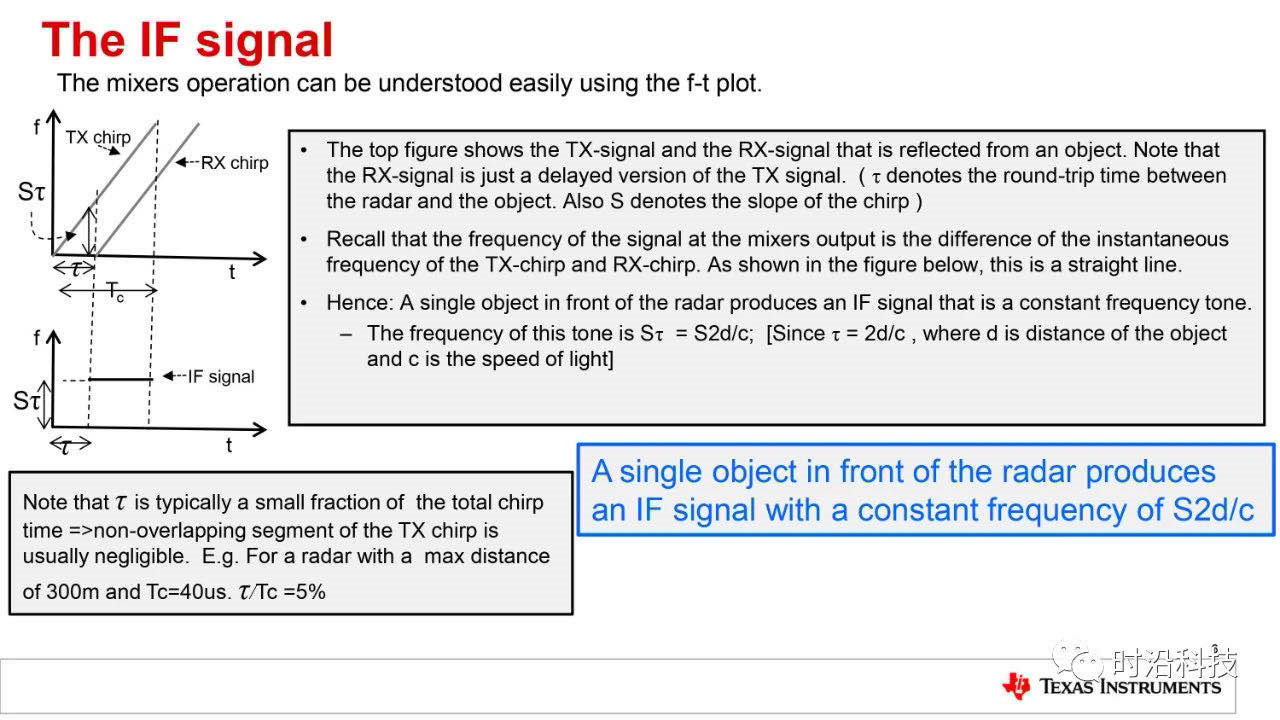
从时频图的角度分析,接收信号RX只是发射信号的时延表达。从上图可以看出,接收信号与发射信号的混频得到的差频信号即为中频信号,而显然中频信号是一个单频点信号。
假设目标与雷达的距离是d,则接收信号的时延tao = 2*d/c;假设线性调频信号的调频斜率是S,则得到的差拍中频信号频率为delta_f= S*tao=2*S*d/c;显然,我们通过对差拍信号进行时频分析,比如通过傅里叶变换,得到差拍信号的频率delta_f。则即可求得目标与雷达的距离。
测距原理:即对于毫米波雷达而言:测距是通过求差拍信号的频率得到。即只要得到了差拍信号频率,即可得到目标的距离信息,即
delta_f= S*tao=2*S*d/c;
上述测距原理也说明了假设场景中存在多个目标,那么回波中我们也能得到多个差拍信号频率,表现在频谱上,则是在频谱上出现了多个峰。这些峰对应着探测场景中的目标。
那么接着深入的一个问题是:
当两个目标距离隔多近之后,我们在频谱上就无法分辨这两个目标了。换句话而言,距离分辨率是多少?
假设两个目标之间的距离为delta_d;则得到的两个目标差拍信号的频率差为delta_f。,进一步我们有:

上述式子中,值得关注的是:
这个式子表达了什么含义呢?我们进一步来看下面一个例子,假设有两个回波信号,他们的频率比较接近,但不相同,那么我们的观测时长究竟取多长,所得到的频谱中才能够将这两个信号区分开来呢?
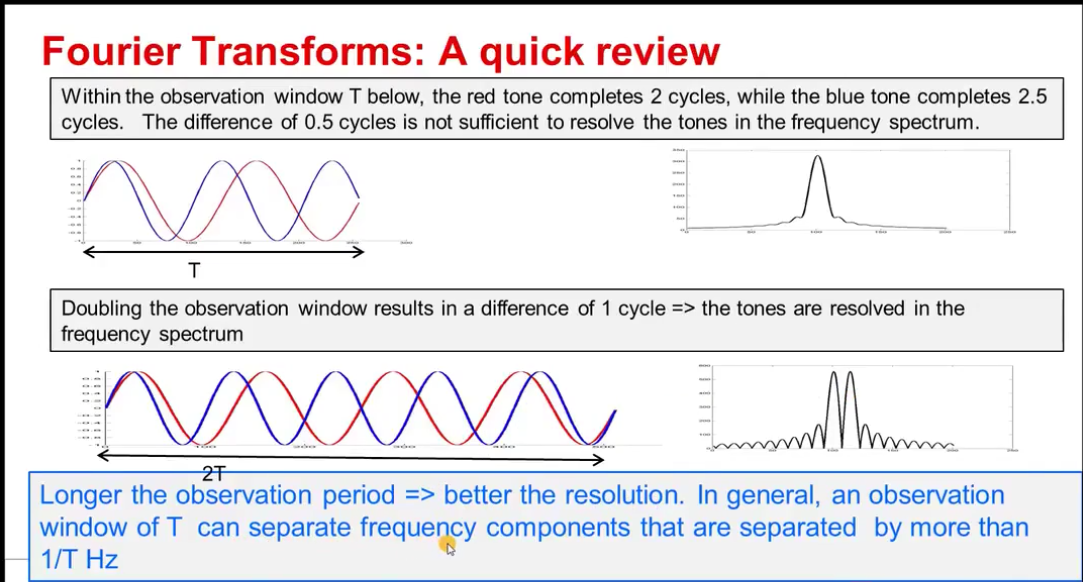
上面的例子说明了,能否将两个频率接近但是不相同的信号从频谱上区分开,取决于我们采集信号的长度,那么这个采集长度至少为多长才可以呢?它的长度应该为
即有了:
因此,我们有:
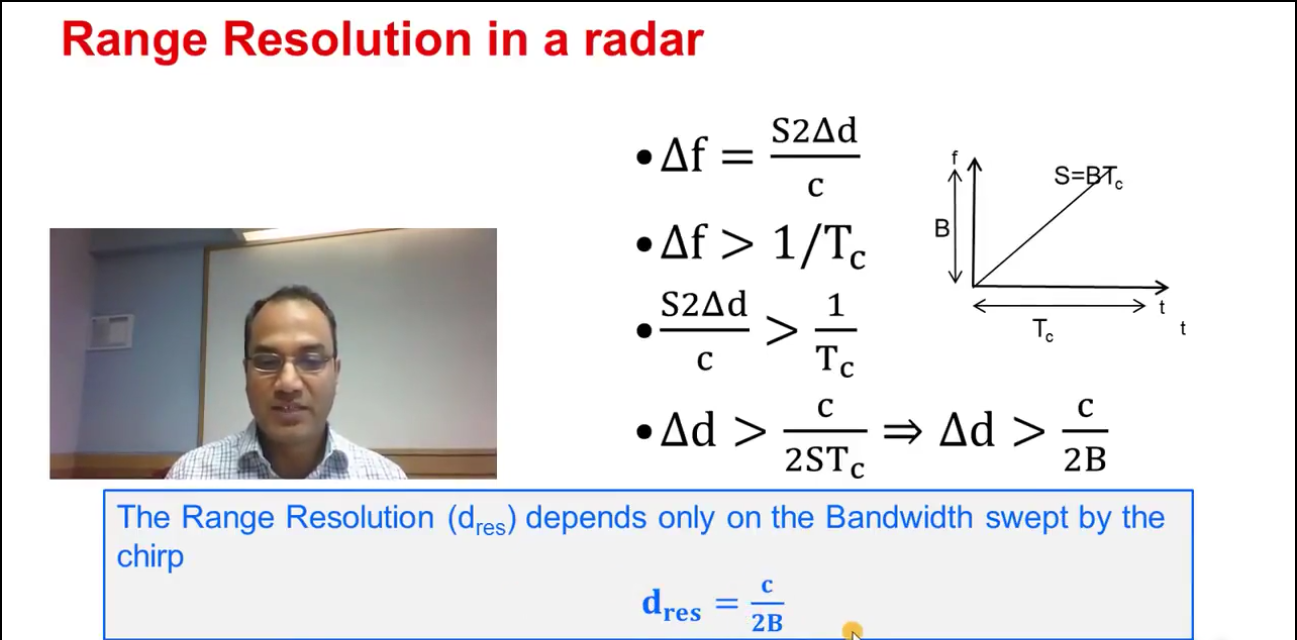
显然,距离分辨率和带宽有关。
讨论完了距离分辨率,进一步的,我们来讨论最远探测距离,下图中给出了影响距离分辨率的因素。
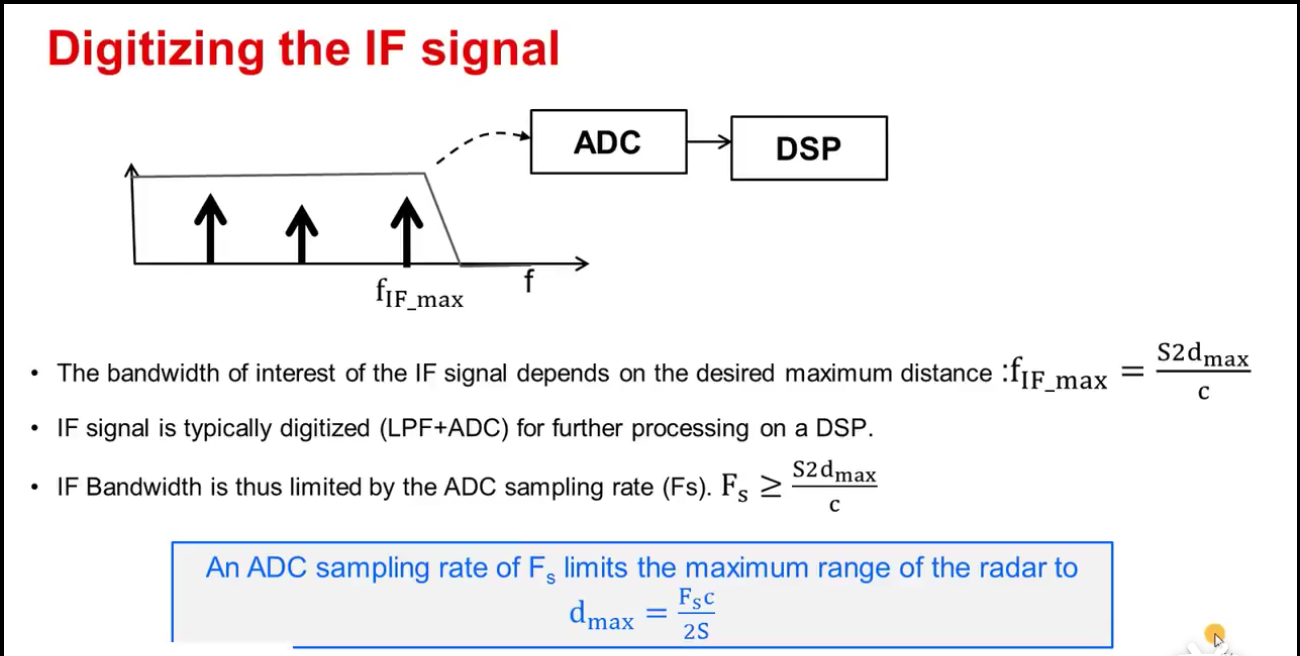
上图表明,除了调频斜率,ADC的采样速率直接影响了最远探测距离。
完整的毫米波工作流程如下图所示:
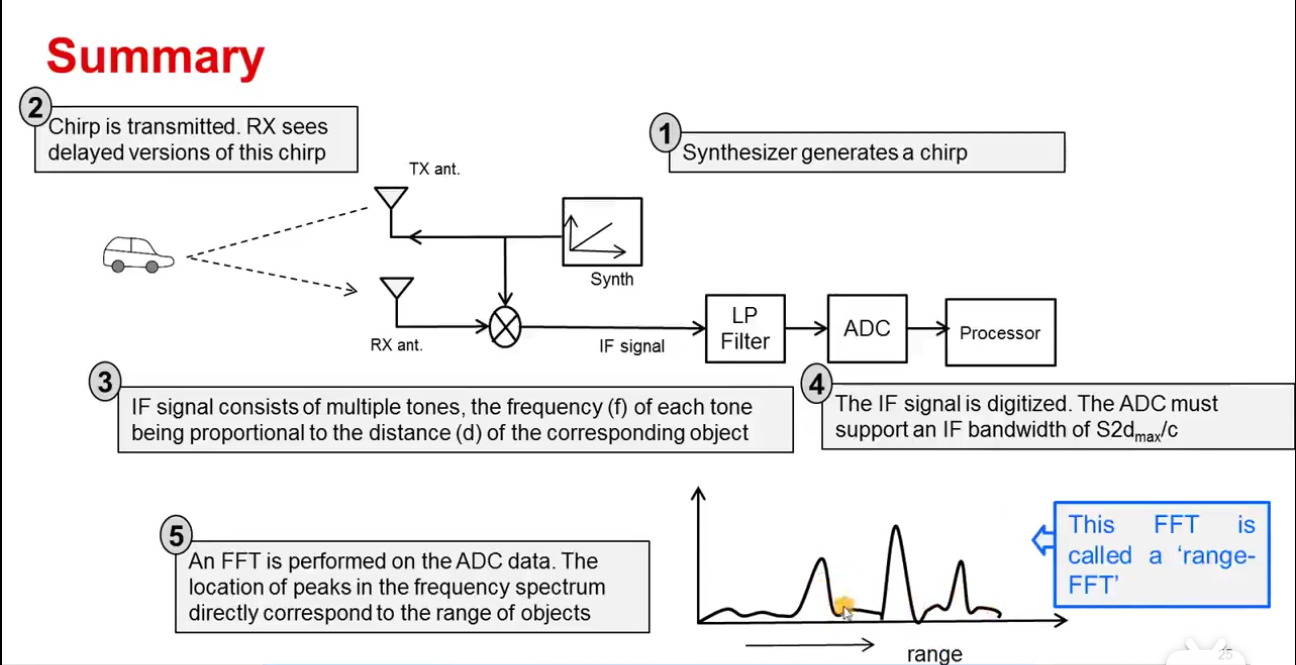
上图表明了,对于一个系统而言,带宽决定了分辨率,ADC采样率决定了最远探测距离。
对毫米波的重要总结公式如下:

上图中,分别给出了目标距离公式,距离分辨率公式,最远探测距离公式。以及射频带宽和中频带宽影响的性能指标。

