应用OpenCV和Python进行SIFT算法的实现
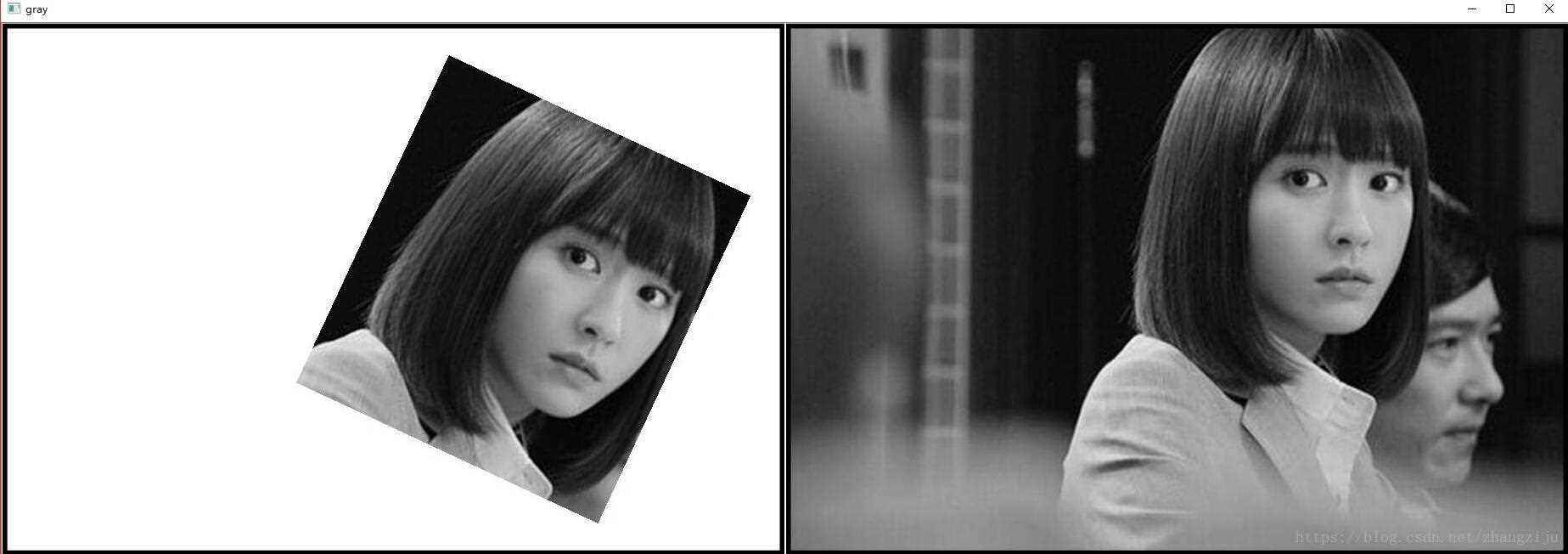
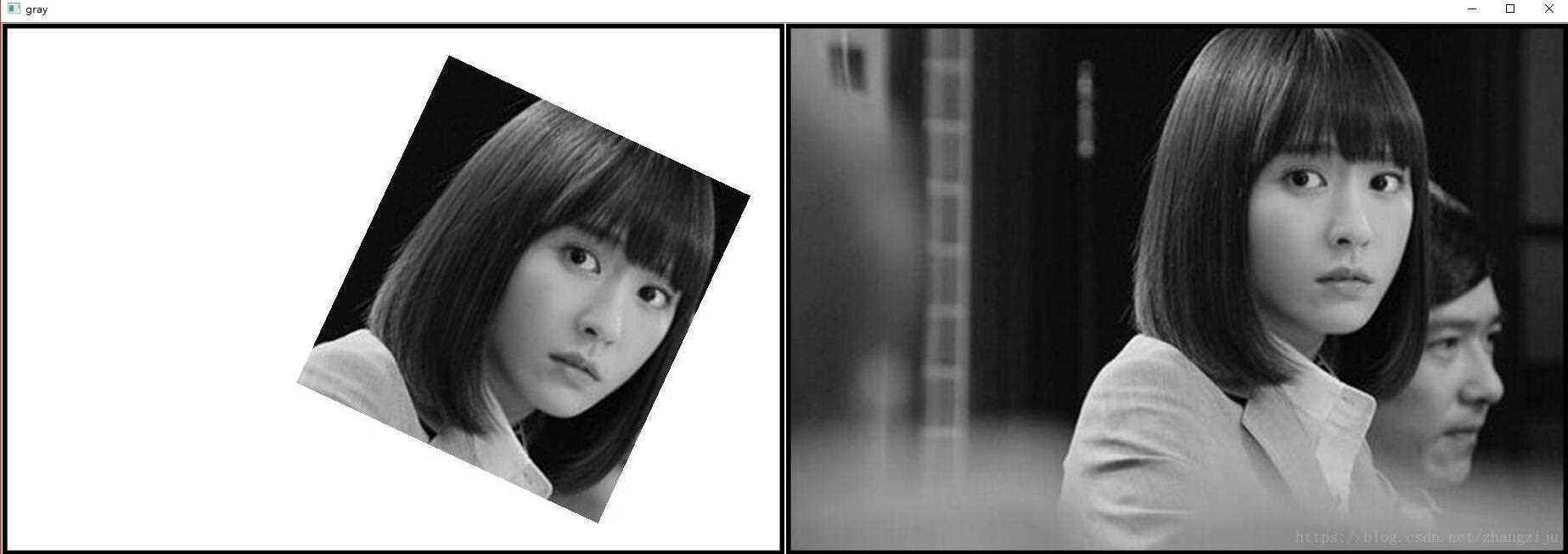
如下图为进行测试的gakki101和gakki102,分别验证基于BFmatcher、FlannBasedMatcher等的SIFT算法,对比其优劣。为体现出匹配效果对于旋转特性的优势,将图gakki101做成具有旋转特性的效果。

基于BFmatcher的SIFT实现
BFmatcher(Brute-Force Matching)暴力匹配,应用BFMatcher.knnMatch( )函数来进行核心的匹配,knnMatch(k-nearest neighbor classification)k近邻分类算法。
kNN算法则是从训练集中找到和新数据最接近的k条记录,然后根据他们的主要分类来决定新数据的类别。该算法涉及3个主要因素:训练集、距离或相似的衡量、k的大小。kNN算法的核心思想是如果一个样本在特征空间中的k个最相邻的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。该方法在确定分类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别。
kNN方法在类别决策时,只与极少量的相邻样本有关。由于kNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,kNN方法较其他方法更为适合。
经检验 BFmatcher在做匹配时会耗费大量的时间。
代码段如下:
import numpy as np
import cv2
from matplotlib import pyplot as plt
imgname1 = 'E:/other/gakki101.jpg'
imgname2 = 'E:/other/gakki102.jpg'
sift = cv2.xfeatures2d.SIFT_create()
img1 = cv2.imread(imgname1)
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) #灰度处理图像
kp1, des1 = sift.detectAndCompute(img1,None) #des是描述子
img2 = cv2.imread(imgname2)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)#灰度处理图像
kp2, des2 = sift.detectAndCompute(img2,None) #des是描述子
hmerge = np.hstack((gray1, gray2)) #水平拼接
cv2.imshow("gray", hmerge) #拼接显示为gray
cv2.waitKey(0)
img3 = cv2.drawKeypoints(img1,kp1,img1,color=(255,0,255)) #画出特征点,并显示为红色圆圈
img4 = cv2.drawKeypoints(img2,kp2,img2,color=(255,0,255)) #画出特征点,并显示为红色圆圈
hmerge = np.hstack((img3, img4)) #水平拼接
cv2.imshow("point", hmerge) #拼接显示为gray
cv2.waitKey(0)
# BFMatcher解决匹配
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1,des2, k=2)
# 调整ratio
good = []
for m,n in matches:
if m.distance < 0.75*n.distance:
good.append([m])
img5 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,flags=2)
cv2.imshow("BFmatch", img5)
cv2.waitKey(0)
cv2.destroyAllWindows()
首先是针对图像的灰度化显示:
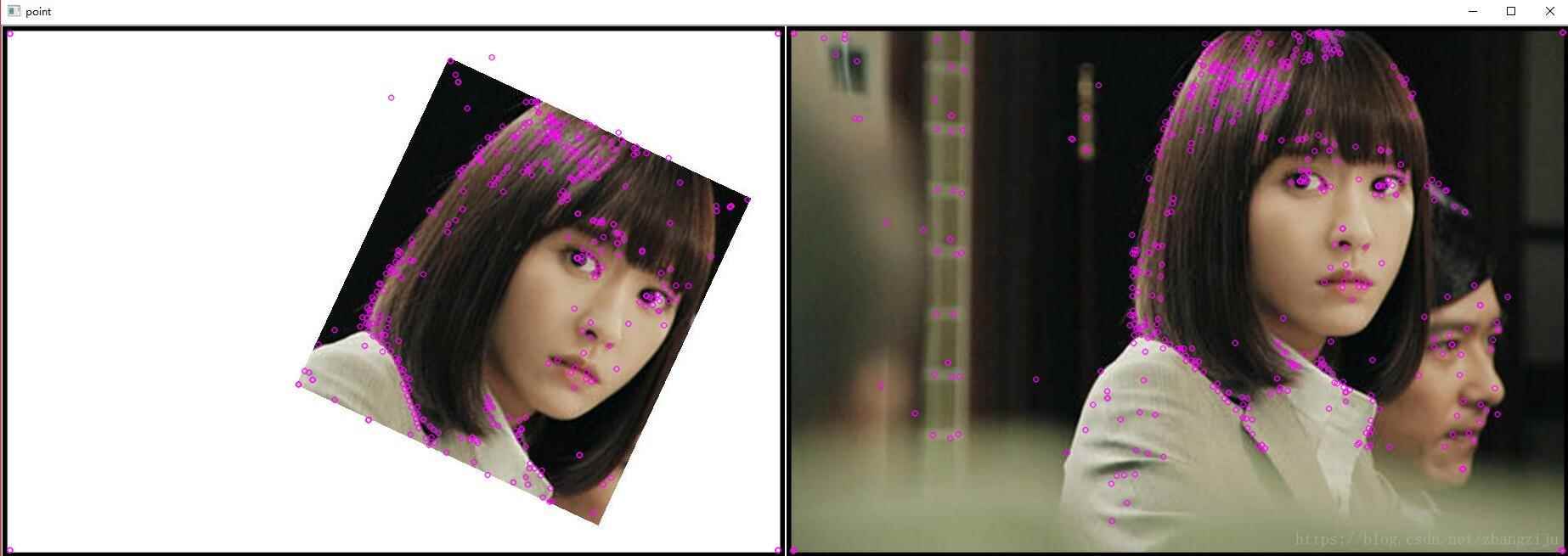
之后完成特征点的标注,用红色圆圈表示:
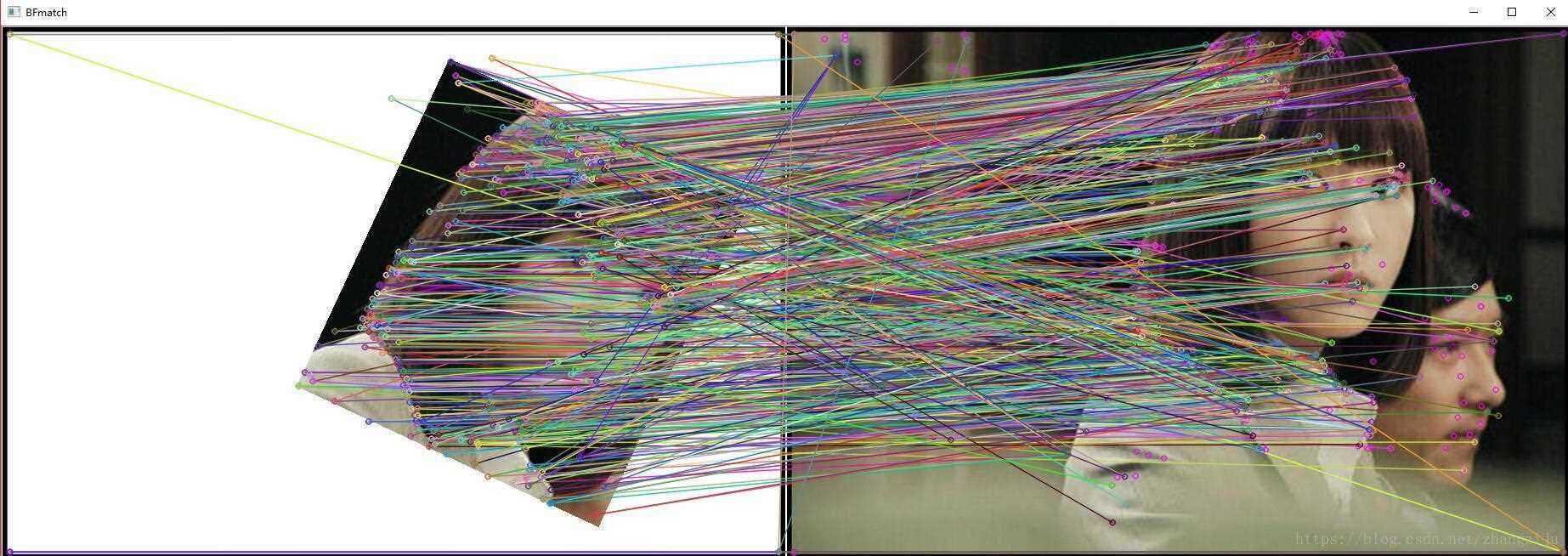
在cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,flags=2)下的匹配效果,比较杂乱,且会出错。
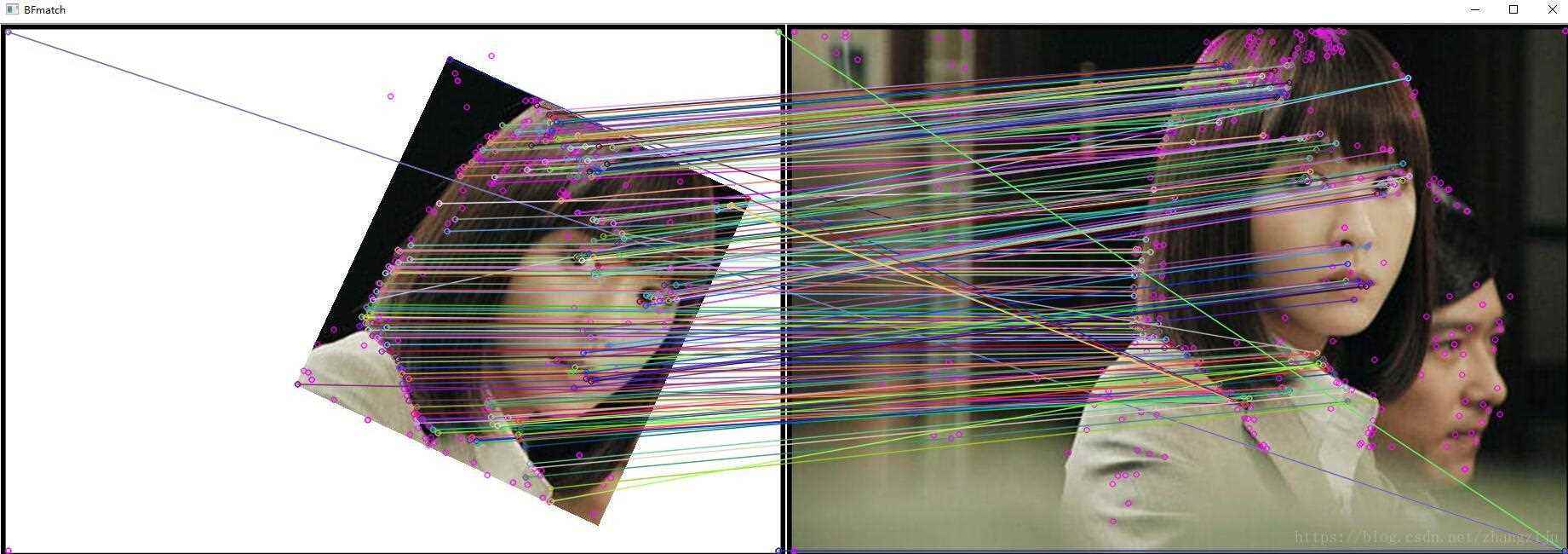
如果更换为cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2),明显优于上面的匹配,并且为预想的匹配区域,其效果为:
基于FlannBasedMatcher的SIFT实现
FLANN(Fast_Library_for_Approximate_Nearest_Neighbors)快速最近邻搜索包,它是一个对大数据集和高维特征进行最近邻搜索的算法的集合,而且这些算法都已经被优化过了。在面对大数据集时它的效果要好于 BFMatcher。
经验证,FLANN比其他的最近邻搜索软件快10倍。使用 FLANN 匹配,我们需要传入两个字典作为参数。这两个用来确定要使用的算法和其他相关参数等。
第一个是 IndexParams。
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5) 。
这里使用的是KTreeIndex配置索引,指定待处理核密度树的数量(理想的数量在1-16)。
第二个字典是SearchParams。
search_params = dict(checks=100)用它来指定递归遍历的次数。值越高结果越准确,但是消耗的时间也越多。实际上,匹配效果很大程度上取决于输入。
5kd-trees和50checks总能取得合理精度,而且短时间完成。在之下的代码中,丢弃任何距离大于0.7的值,则可以避免几乎90%的错误匹配,但是好的匹配结果也会很少。
import numpy as np
import cv2
from matplotlib import pyplot as plt
imgname1 = 'E:/other/gakki101.jpg'
imgname2 = 'E:/other/gakki102.jpg'
sift = cv2.xfeatures2d.SIFT_create()
# FLANN 参数设计
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
img1 = cv2.imread(imgname1)
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) #灰度处理图像
kp1, des1 = sift.detectAndCompute(img1,None)#des是描述子
img2 = cv2.imread(imgname2)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
kp2, des2 = sift.detectAndCompute(img2,None)
hmerge = np.hstack((gray1, gray2)) #水平拼接
cv2.imshow("gray", hmerge) #拼接显示为gray
cv2.waitKey(0)
img3 = cv2.drawKeypoints(img1,kp1,img1,color=(255,0,255))
img4 = cv2.drawKeypoints(img2,kp2,img2,color=(255,0,255))
hmerge = np.hstack((img3, img4)) #水平拼接
cv2.imshow("point", hmerge) #拼接显示为gray
cv2.waitKey(0)
matches = flann.knnMatch(des1,des2,k=2)
matchesMask = [[0,0] for i in range(len(matches))]
good = []
for m,n in matches:
if m.distance < 0.7*n.distance:
good.append([m])
img5 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,flags=2)
cv2.imshow("FLANN", img5)
cv2.waitKey(0)
cv2.destroyAllWindows()
首先是针对图像的灰度化显示:
之后完成特征点的标注,用红色圆圈表示:

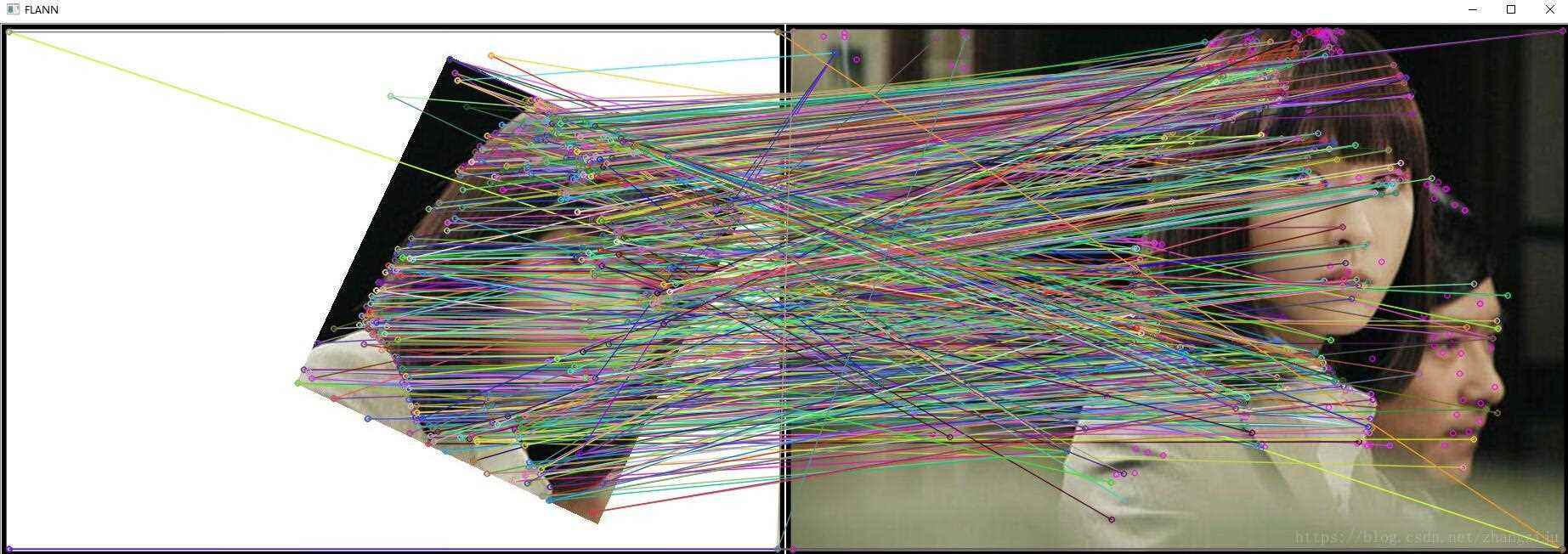
在cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,flags=2)下的匹配效果,比较杂乱,且会出错。
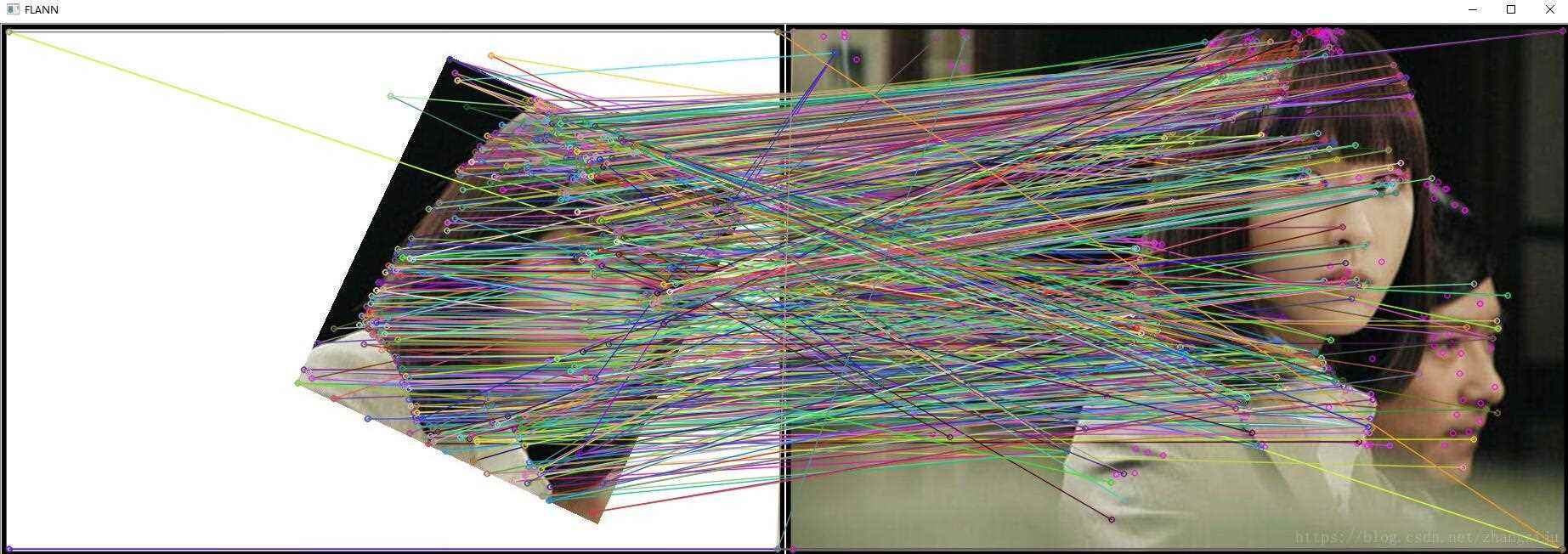
如果更换为cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2),明显优于上面的匹配,并且为预想的匹配区域,其效果为:
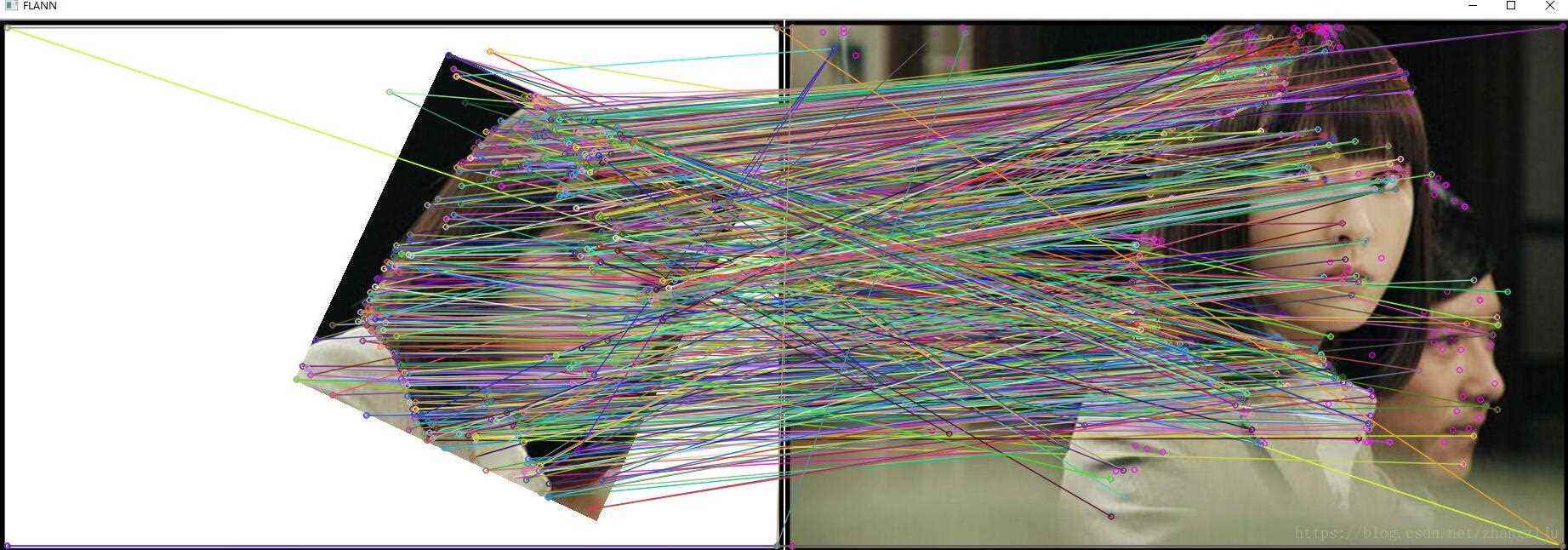
修改if m.distance < 0.7*n.distance:为 if m.distance < 1*n.distance:,显示效果为:
可见,虽然值越大,匹配的线条越密集,但错误匹配点也会增多,在lowe论文中,Lowe推荐ratio的阈值为0.8,但作者对大量任意存在尺度、旋转和亮度变化的两幅图片进行匹配,结果表明ratio取值在0. 4~0. 6 之间最佳,小于0. 4的很少有匹配点,大于0. 6的则存在大量错误匹配点,所以建议ratio的取值原则如下:
ratio=0. 4:对于准确度要求高的匹配;
ratio=0. 6:对于匹配点数目要求比较多的匹配;
ratio=0. 5:一般情况下。
基于FlannBasedMatcher的SURF实现
SURF全称为“加速稳健特征”(Speeded Up Robust Feature),不仅是尺度不变特征,而且是具有较高计算效率的特征。可被认为SURF是尺度不变特征变换算法(SIFT算法)的加速版。SURF最大的特征在于采用了haar特征以及积分图像的概念,SIFT采用的是DoG图像,而SURF采用的是Hessian矩阵(SURF算法核心)行列式近似值图像。SURF借鉴了SIFT算法中简化近似的思想,实验证明,SURF算法较SIFT算法在运算速度上要快3倍,综合性优于SIFT算法。
import numpy as np
import cv2
from matplotlib import pyplot as plt
imgname1 = 'E:/other/gakki101.jpg'
imgname2 = 'E:/other/gakki102.jpg'
surf = cv2.xfeatures2d.SURF_create()
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params,search_params)
img1 = cv2.imread(imgname1)
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) #灰度处理图像
kp1, des1 = surf.detectAndCompute(img1,None)#des是描述子
img2 = cv2.imread(imgname2)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
kp2, des2 = surf.detectAndCompute(img2,None)
hmerge = np.hstack((gray1, gray2)) #水平拼接
cv2.imshow("gray", hmerge) #拼接显示为gray
cv2.waitKey(0)
img3 = cv2.drawKeypoints(img1,kp1,img1,color=(255,0,255))
img4 = cv2.drawKeypoints(img2,kp2,img2,color=(255,0,255))
hmerge = np.hstack((img3, img4)) #水平拼接
cv2.imshow("point", hmerge) #拼接显示为gray
cv2.waitKey(0)
matches = flann.knnMatch(des1,des2,k=2)
good = []
for m,n in matches:
if m.distance < 0.7*n.distance:
good.append([m])
img5 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2)
cv2.imshow("SURF", img5)
cv2.waitKey(0)
cv2.destroyAllWindows()
在cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,flags=2)下的匹配效果,比较杂乱,且会出错。
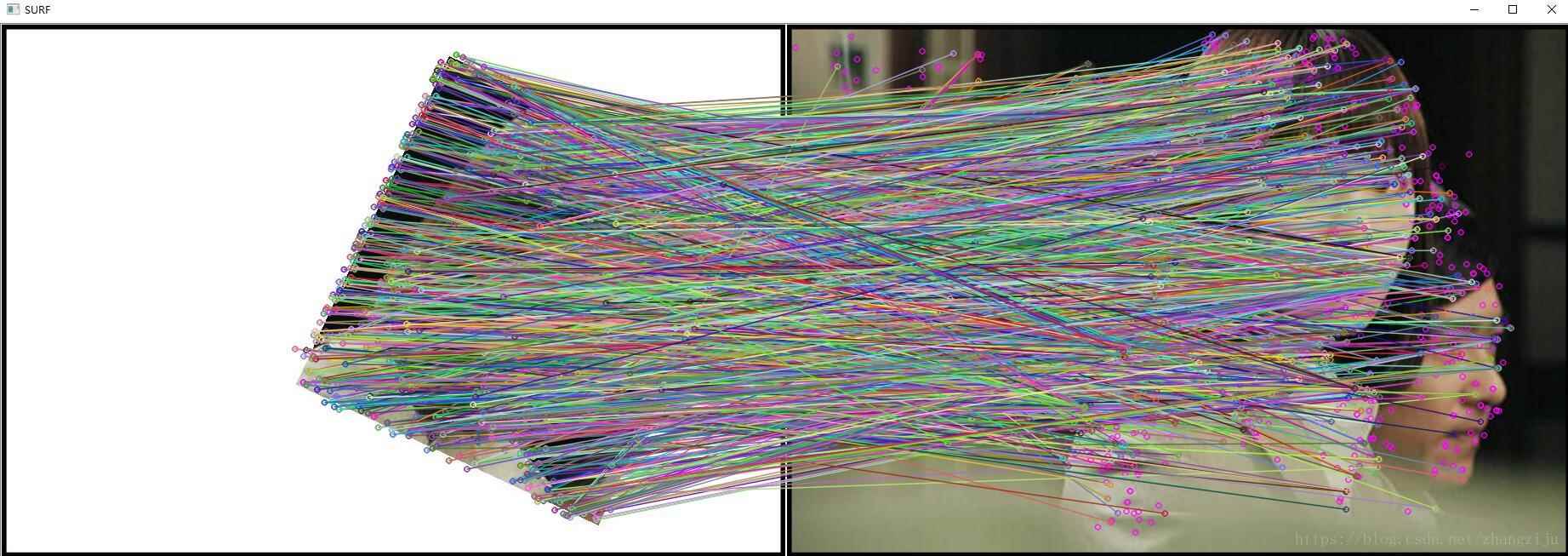
如果更换为cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2),明显优于上面的匹配,并且为预想的匹配区域,其效果为:
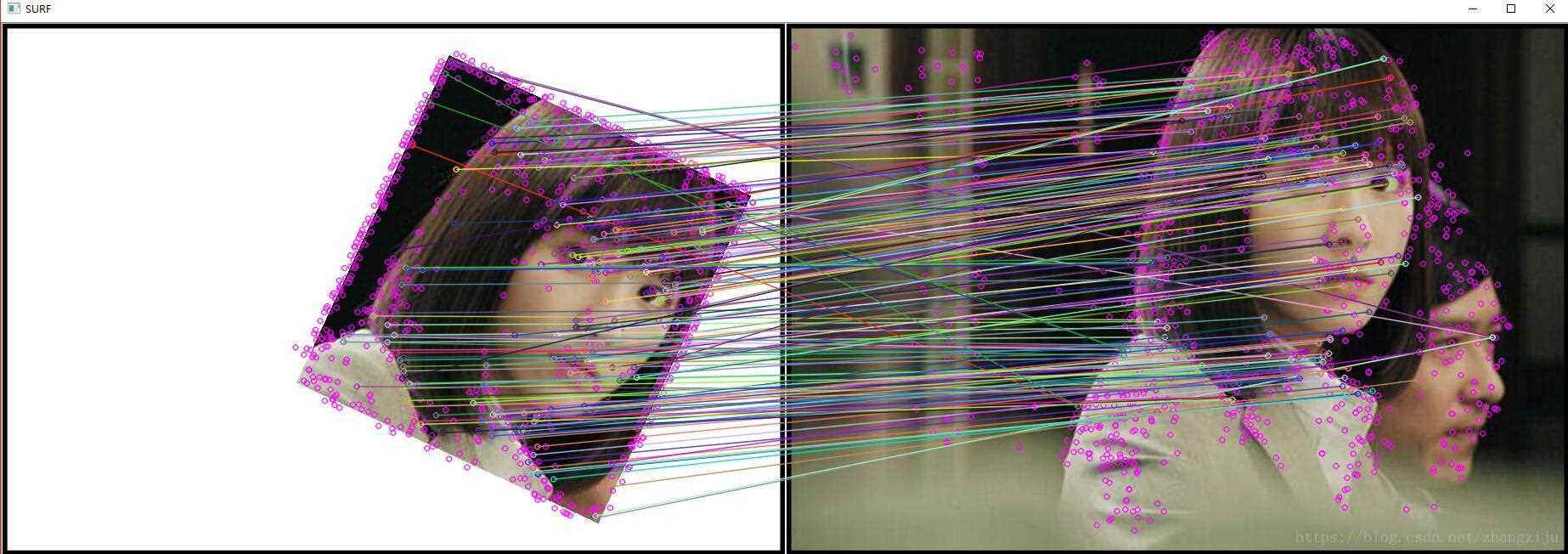
但就其错误点数量和匹配效果而言,并没有SIFT来的理想。
基于BFMatcher的ORB实现
ORB(Oriented Fast and Rotated BRIEF),结合Fast与Brief算法,并给Fast特征点增加了方向性,使得特征点具有旋转不变性,并提出了构造金字塔方法,解决尺度不变性,但文章中没有具体详述。特征提取是由FAST(Features from Accelerated Segment Test)算法发展来的,特征点描述是根据BRIEF(Binary Robust Independent Elementary Features)特征描述算法改进的。ORB特征是将FAST特征点的检测方法与BRIEF特征描述子结合起来,并在它们原来的基础上做了改进与优化。ORB主要解决BRIEF描述子不具备旋转不变性的问题。实验证明,ORB远优于之前的SIFT与SURF算法,ORB算法的速度是sift的100倍,是surf的10倍。
import numpy as np
import cv2
from matplotlib import pyplot as plt
imgname1 = 'E:/other/gakki101.jpg'
imgname2 = 'E:/other/gakki102.jpg'
orb = cv2.ORB_create()
img1 = cv2.imread(imgname1)
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) #灰度处理图像
kp1, des1 = orb.detectAndCompute(img1,None)#des是描述子
img2 = cv2.imread(imgname2)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
kp2, des2 = orb.detectAndCompute(img2,None)
hmerge = np.hstack((gray1, gray2)) #水平拼接
cv2.imshow("gray", hmerge) #拼接显示为gray
cv2.waitKey(0)
img3 = cv2.drawKeypoints(img1,kp1,img1,color=(255,0,255))
img4 = cv2.drawKeypoints(img2,kp2,img2,color=(255,0,255))
hmerge = np.hstack((img3, img4)) #水平拼接
cv2.imshow("point", hmerge) #拼接显示为gray
cv2.waitKey(0)
# BFMatcher解决匹配
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1,des2, k=2)
# 调整ratio
good = []
for m,n in matches:
if m.distance < 0.75*n.distance:
good.append([m])
img5 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2)
cv2.imshow("ORB", img5)
cv2.waitKey(0)
cv2.destroyAllWindows()
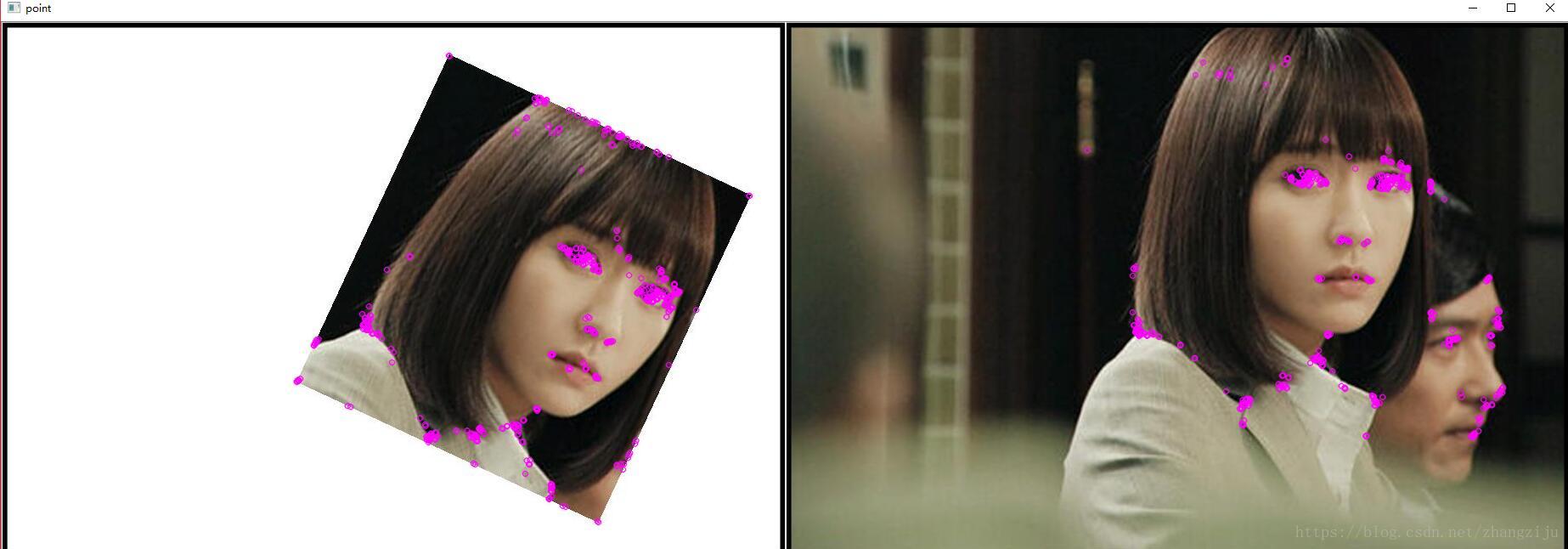
经显示观察到,ORB算法在特征点标记时数量较少,如图:
在cv2.drawMatchesKnn(img1,kp1,img2,kp2,matches,None,flags=2)下的匹配效果,比较杂乱,且会出错。
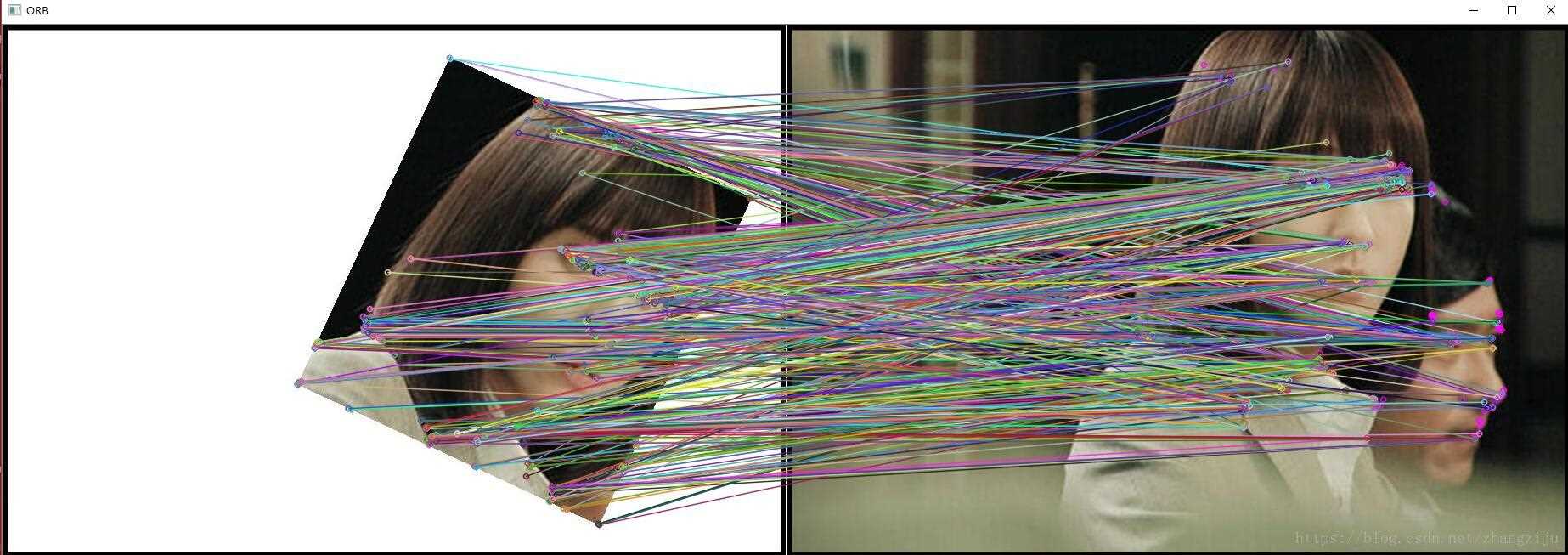
如果更换为cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2),明显优于上面的匹配,并且为预想的匹配区域,其效果为:
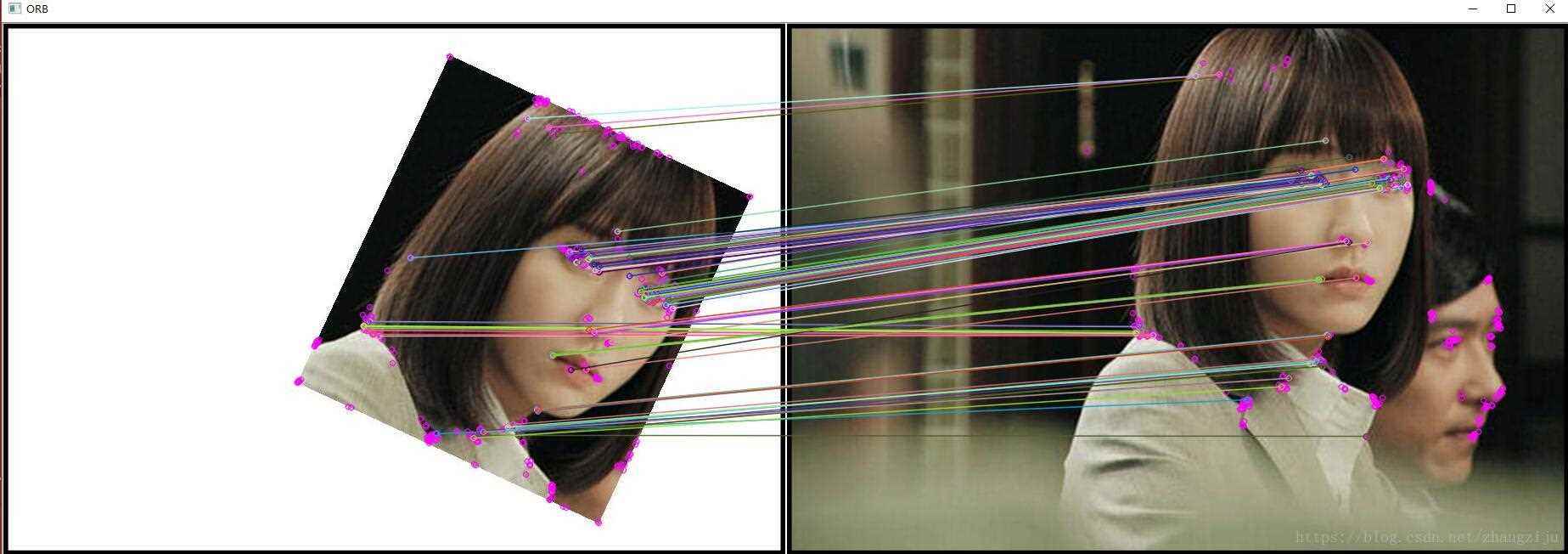
但同样会出现在同样的匹配方式上,效果不如SIFT的现象。
如下为使用FAST作为特征描述的关键代码和提取图像显示:
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('E:/other/gakki102.',0)
fast=cv2.FastFeatureDetector_create()#获取FAST角点探测器
kp=fast.detect(img,None)#描述符
img = cv2.drawKeypoints(img,kp,img,color=(255,255,0))#画到img上面
print ("Threshold: ", fast.getThreshold())#输出阈值
print ("nonmaxSuppression: ", fast.getNonmaxSuppression())#是否使用非极大值抑制
print ("Total Keypoints with nonmaxSuppression: ", len(kp))#特征点个数
cv2.imshow('fast',img)
cv2.waitKey(0)
如图为FAST特征提取的图像显示:


