今天的目标是用OpenCV实现对运动目标的检测,这里选用三帧帧差法。代码如下:
#include <opencv2/opencv.hpp>
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <ctype.h>
double Threshold_index=0;
const int CONTOUR_MAX_AERA = 200;
void trackbar(int pos)
{
Threshold_index=(double)pos;
}
int main(int argc, char* argv[])
{
CvCapture *capture=cvCaptureFromCAM(0);
int n_cnt=0;
IplImage *img=NULL,
*img_gray1=NULL,
*img_gray2=NULL,
*img_gray3=NULL,
*img_diff1=NULL,
*img_diff2=NULL,
*img_diff_and=NULL,
*img_binary=NULL,
*img_dilate=NULL;
CvMemStorage *stor;
CvSeq *cont;
stor=cvCreateMemStorage(0);
cont=cvCreateSeq(CV_SEQ_ELTYPE_POINT,sizeof(CvSeq),sizeof(CvPoint),stor);
cvNamedWindow("test",CV_WINDOW_AUTOSIZE);
cvNamedWindow("dilate",CV_WINDOW_AUTOSIZE);
img=cvQueryFrame(capture);
img_gray1=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_gray2=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_gray3=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_diff1=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_diff2=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_diff_and=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_binary=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
img_dilate=cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
int index=1;
cvCreateTrackbar("Threshold","test",&index,255,trackbar);
while(img=cvQueryFrame(capture))
{
if(n_cnt%3==0)
cvCvtColor(img,img_gray1,CV_BGR2GRAY);
else if(n_cnt%3==1)
cvCvtColor(img,img_gray2,CV_BGR2GRAY);
else if(n_cnt%3==2)
cvCvtColor(img,img_gray3,CV_BGR2GRAY);
char c=(char)cvWaitKey(25);
if(c==27)
break;
if(n_cnt>3)
{
cvAbsDiff(img_gray1,img_gray2,img_diff1);
cvAbsDiff(img_gray2,img_gray3,img_diff2);
cvAnd(img_diff1,img_diff2,img_diff_and);
cvThreshold(img_diff_and,img_binary,Threshold_index,255,CV_THRESH_BINARY);
cvShowImage("test",img_binary);
cvDilate(img_binary,img_dilate);
//cvShowImage("dilate",img_dilate);
cvFindContours(img_dilate,stor,&cont,sizeof(CvContour),CV_RETR_LIST,CV_CHAIN_APPROX_SIMPLE,cvPoint(0,0));
for(;cont;cont = cont->h_next)
{
CvRect r = ((CvContour*)cont)->rect;//子类转换为父类例子
if(r.height * r.width > CONTOUR_MAX_AERA) // 面积小的方形抛弃掉
{
cvRectangle(img, cvPoint(r.x,r.y),
cvPoint(r.x + r.width, r.y + r.height),
CV_RGB(255,0,0), 1, CV_AA,0);
}
}
cvShowImage("dilate",img);
}
if(c=='s')
{
cvSaveImage("d:/img.bmp",img);
cvSaveImage("d:/img_binary.bmp",img_dilate);
}
n_cnt++;
}
cvDestroyAllWindows();
cvReleaseCapture(&capture);
cvReleaseImage(&img_gray1);
cvReleaseImage(&img_gray2);
cvReleaseImage(&img_gray3);
cvReleaseImage(&img_diff1);
cvReleaseImage(&img_diff2);
cvReleaseImage(&img_diff_and);
cvReleaseImage(&img_binary);
cvReleaseImage(&img_dilate);
cvReleaseMemStorage(&stor);
return 0;
}
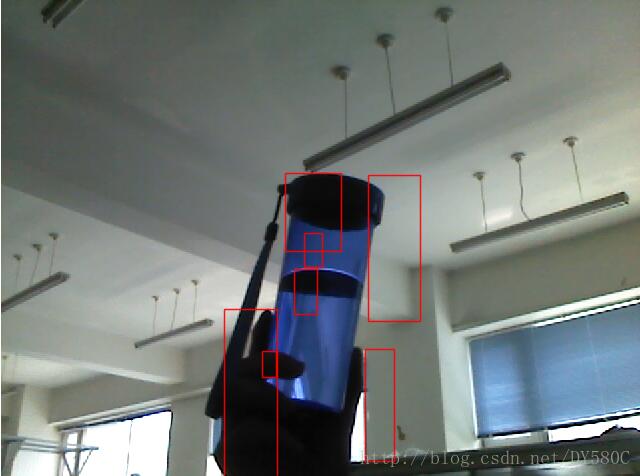
下图是检测的运动目标二值化图像以及在实际图像中叠加的矩形框效果图。