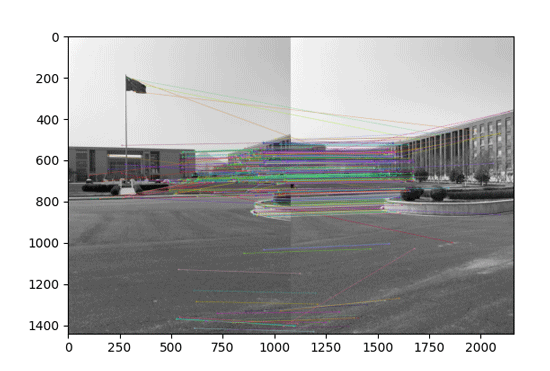
该方法被用于绘制关键点的匹配情况。我们看到的许多匹配结果都是使用这一方法绘制的——一左一右两张图像,匹配的关键点之间用线条链接。
cv.drawMatches( img1, keypoints1, img2, keypoints2, matches1to2, outImg[, matchColor[, singlePointColor[, matchesMask[, flags]]]]) -> outImg cv.drawMatches( img1, keypoints1, img2, keypoints2, matches1to2, outImg, matchesThickness[, matchColor[, singlePointColor[, matchesMask[, flags]]]] ) -> outImg cv.drawMatchesKnn( img1, keypoints1, img2, keypoints2, matches1to2, outImg[, matchColor[, singlePointColor[, matchesMask[, flags]]]]) -> outImg
matchColor==Scalar::all(-1) 时,代表取随机颜色。singlePointColor==Scalar::all(-1) 时,代表取随机颜色。def bf_match(img_path1, img_path2):
# 读取两张图像
img1 = cv2.imread(img_path1, cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread(img_path2, cv2.IMREAD_GRAYSCALE)
# 计算两张图像的SIFT描述符
kp1, des1, _ = sift_algorithm(img_path1)
kp2, des2, _ = sift_algorithm(img_path2)
# 创建BFMatcher实例
bf = cv2.BFMatcher()
# 获得最佳匹配
matches = bf.match(des1, des2)
# 绘制匹配结果
# matches = sorted(matches, key = lambda x:x.distance)
match_result = cv2.drawMatches(img1, kp1, img2, kp2, matches, None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)
# 显示绘制结果
plt.imshow(match_result)
plt.show()
return match_result