将四台传送带理想化为四台三相异步交流电动机,即接收传送由三相异步电动机拖动实现。
实现传送带接收传送目标:
二、设计方案
(一)电气原理图

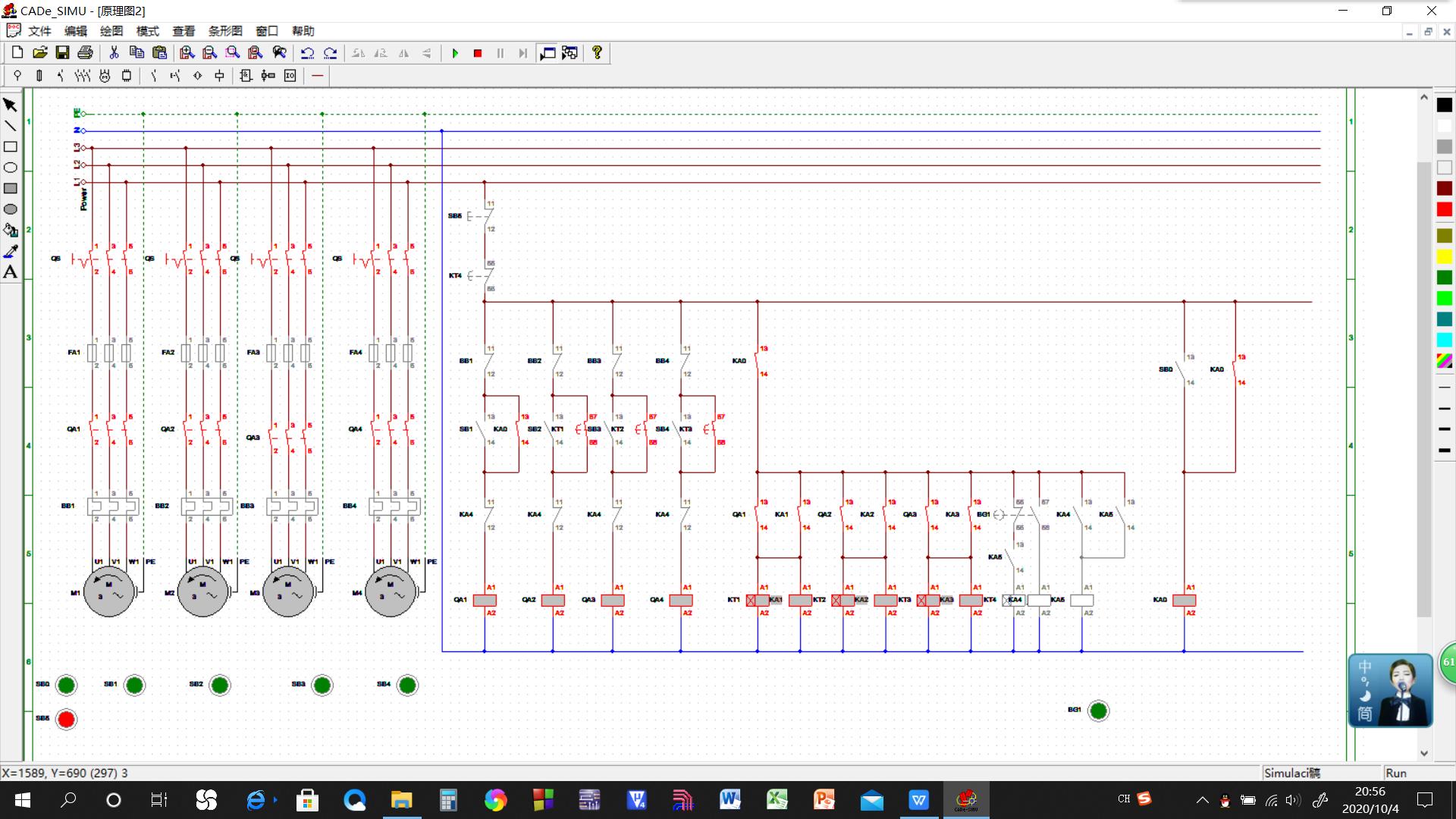
图一 电气原理图
按下常开按钮SB1,辅助电路接触器QA1上电,主电路接触器QA1触点闭合,三相异步电动机M1运行。
同理,按下常开按钮SB2、SB3、SB4可使三相异步电动机实现逆序点动运行。
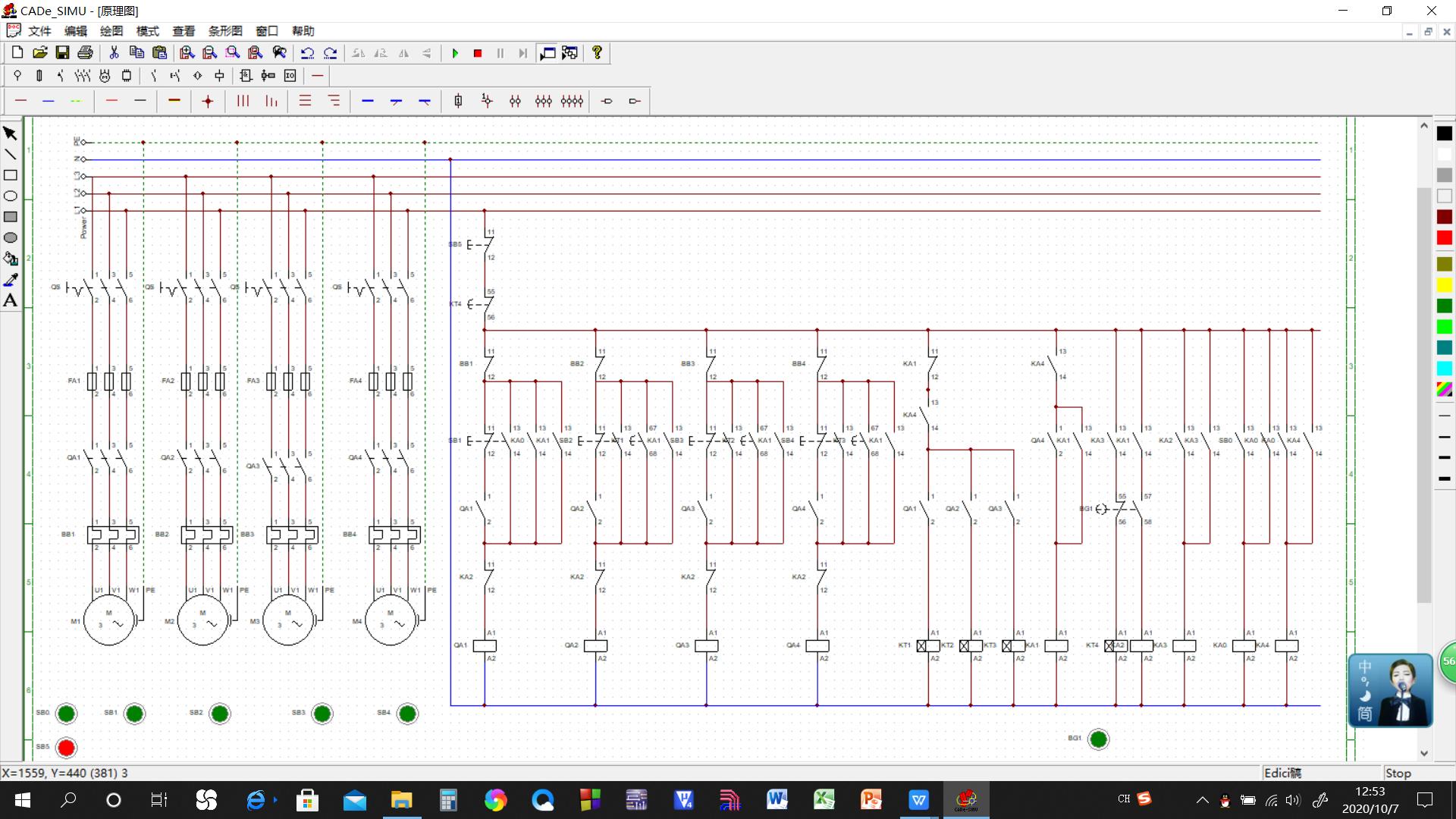
按下常开按钮SB0,中继器KA0上电,中继器KA0触点闭合,中继器KA0实现自锁,此时,接触器QA1上电,三相异步电动机(下文简称电动机)M1开始逆序运行,接触器QA1触点闭合,时间继电器KT1和中继器KA1同时上电,中继器KA1触点闭合,延时2秒,时间继电器KT1触点闭合,接触器QA2上电,电动机M2开始逆序运行,接触器QA2触点闭合,时间继电器KT2和中继器KA2同时上电,中继器KA2触点闭合,延时2秒,时间继电器KT2触点闭合,接触器QA3上电,电动机M3开始逆序运行,接触器QA3触点闭合,时间继电器KT3和中继器KA3同时上电,中继器KA3触点闭合,延时2秒,时间继电器触点KT3闭合,接触器QA4上电,电动机M4开始逆序运行,此时实现四台三相异步电动机逆序延时启动运行。
图二 逆序启动运行后的的仿真
手动按下连接行程开关的按钮(BG1),模拟当包裹到达末端时挤压行程开关的情况。行程开关BG1的常开触点闭合,中继器KA4上电,中继器KA4常开触点闭合,常闭触点打开,电动机全部停止工作。
同时,中继器KA5上电,中继器KA5触点闭合,中继器KA5处于自锁状态,等到包裹被机械臂取走后,行程开关BG1恢复,即行程开关BG1常开触点断开,常闭触点闭合,中继器KA4失电,中继器常闭触点KA4恢复闭合状态,四台电动机同时重新启动运行。
中间继电器及其触点KA1、KA2、KA3是为了保证四台电动机能够同时启动。
行程开关BG1恢复后,由于中继器KA5触点闭合,时间继电器KT4上电,延时一分钟(5秒),若期间有货物送达传送带末端,机械臂来取货物,同问题3;若期间无货物送达,则四台电动机全部停止。

图三 取完货后等待过程(还剩2秒)
如果遇到紧急情况需要立即关停全部电机,按下常闭按钮SB5,即可实现四台电动机全部停止运行。
三、总结
(一)设计、仿真过程中遇到的问题及解决办法
1、软件中没有找到常开按钮
解决办法:由于在CADe_SIMU软件驱动器按钮一栏中没有找到常开按钮,我用一个按下按钮(圆形)和一个NO接点代替常开按钮。
2、软件中没有找到行程开关
解决办法:由于在CADe_SIMU软件开关一栏中没有找到行程开关,我用一个按下按钮(圆形)和一个NO+NC联系超时的连接断开接点代替常开按钮。
3、设计过程中,导线如果连接不当,软件无法自动识别,导致电路断开,无法正常运行
解决办法:查找未接通的线路,重新连线。(十分耗时)
4、点动时,使用复合按钮,使接触器QA1上电,松开时,接触器触点QA1无法正常断开
解决办法:在软件中似乎无法解决。因为复合按钮在断开时应该是先断开常开触点,再闭合常闭触点,期间有一个微妙的时间差,不过软件中无法实现,只能同时开合,导致仿真失败。
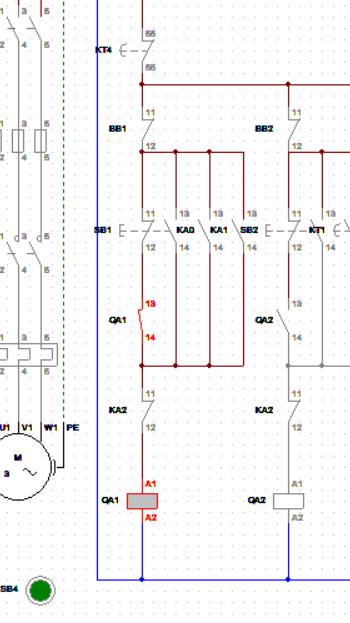
附:方案二
按下复合按钮SB1,辅助电路复合按钮SB1常闭端子(先)断开,同时常开端子闭合,接触器QA1上电,接触器QA1触点闭合,同时主电路接触器QA1触点闭合,三相异步电动机M1开始逆序运行;松开复合按钮SB1,辅助电路复合按钮SB1常开端子(先)断开,此时接触器QA1失电,接触器QA1触点断开,SB1常开端子断开的同时常闭端子闭合,三相异步电动机M1停止运行。
同理,按下复合按钮SB2、SB3、SB4可使三相异步电动机实现逆序点动运行。
错误点:即上述遇到的问题4,可能现实中操作能够实现。
按下常开按钮SB0,中继器KA0上电,中继器触点KA0闭合,中继器KA4上电,中继器触点KA4闭合,此时按钮SB0已断开,中继器KA0、KA4实现自锁。
接触器QA1上电,三相异步电动机(下文简称电动机)M1逆序运行,接触器QA1触点闭合,时间继电器KT1上电,延时2秒,时间继电器KT1触点闭合,接触器QA2上电,电动机M2逆序运行,接触器QA2触点闭合,时间继电器KT2上电,延时2秒,时间继电器KT2触点闭合,接触器QA3上电,电动机M3逆序运行,接触器QA3触点闭合,时间继电器KT3上电,延时2秒,时间继电器KT3触点闭合,接触器QA4上电,电动机M4逆序运行。
接触器QA4上电,接触器QA4触点闭合,中继器KA1上电,中继器KA1触点闭合,KA1实现自锁。此时接触器QA1、QA2、QA3、QA4均上电,四个接触器实现互锁。货物到达传送带末端时挤压行程开关BG1,其常开触点闭合,常闭触点断开,中继器KA2上电,中继器KA2常开触点闭合,中继器KA3上电,中继器KA3触点闭合,接触器KA3实现自锁。接触器KA2常闭触点断开,四台电动机均停止运行。当机械臂将货物取走时,行程开关BG1常开触点断开,常闭触点闭合,时间继电器KT4上电,接触器KA2失电,接触器KA2常闭触点闭合,四台电动机同时重新启动运行。
错误点:当按下行程开关时,接触器KA1自动失电,问题仍未解决,应该是软件逻辑问题。
由于方案二的步骤三没有实现,导致方案二的步骤四也无法实现。
5、停止运行
如果遇到紧急情况需要立即关停全部电机,按下常闭按钮SB5,即可实现四台电动机全部停止运行。

