在这个文章中,我们将学习如何在感兴趣区域周围画最小面积矩形框。
下图显示了两个矩形框,绿色的是普通矩形框,红色的是最小面积矩形框。可以发现,红色的是旋转矩形。

OpenCV提供了一个函数cv2.minAreaRect来寻找最小面积的旋转矩形。将2D点集作为输入,并返回一个Box2D结构,其中包括以下详细信息–(中心(x,y),(宽度、高度)、旋转角度)。
(center(x,y), (width, height), angle of rotation) = cv2.minAreaRect(points)
但是要绘制一个矩形,我们需要矩形的四个角,因此为了将Box2D结构转换为4个角点,OpenCV提供了另一个函数cv2.boxPoints(),这将Box2D结构作为输入并返回4个角点。4个角点从y最高的点开始按顺时针顺序排列。语法如下:
points = cv2.boxPoints(box)
在绘制矩形之前,需要将4个角点转换为整数类型。可以使用np.int32或者np.int64(不要使用np.int8,因为它允许最大值127并截断)。有时,你可能会看到使用了np.int0,不要混淆,这相当于np.int32或者np.int64,具体取决于你的系统结构。完整的代码如下:
rect = CV2.minAreaRect(cnt) box = cv2.boxPoints(rect) box = np.int0(box)
得到四个坐标后,就可以轻松绘制图形了。现在,让我们讨论一下旋转角度。
获得四个角点以后,这四个角点从具有最高y的点开始按顺时针顺序排列,如下所示。如果2个点具有相同的最高y,则最右的点是起点。这些点被编号为0,1,2,3(0开始,3结束)。
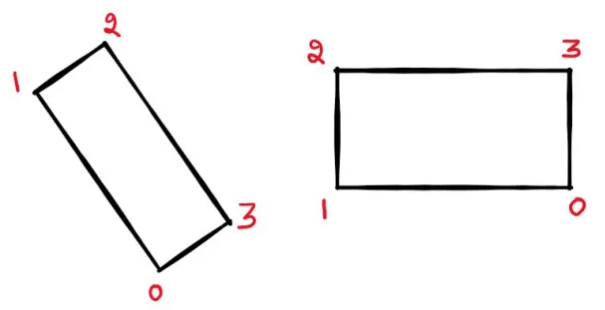
因此,OpenCV的cv2.minAreaRect()给出的旋转角度实际上是直线(连接起点和终点)与水平线之间的角度,如下所示。

因此角度值始终位于[-90, 0)之间。为什么?因为如果对象旋转超过90°,则使用下一条边来计算与水平面的角度。因此计算出的角度始终位于[-90,0)之间。

实际角度是对象旋转的角度,计算出的角度是cv.minAreaRect()返回的角度。
函数使用方法
min_rect = cv2.minAreaRect(cnt) # 输入参数cnt是通过findContours识别出来的轮廓信息 # 输出min_rect是一个元组,其中的结构是最小外接矩形的(中心(x,y),(边1长度,边2长度),旋转角度)
简单测试一下对几个角度的矩形和平行四边形的识别效果
图片可能较小,建议放大观看
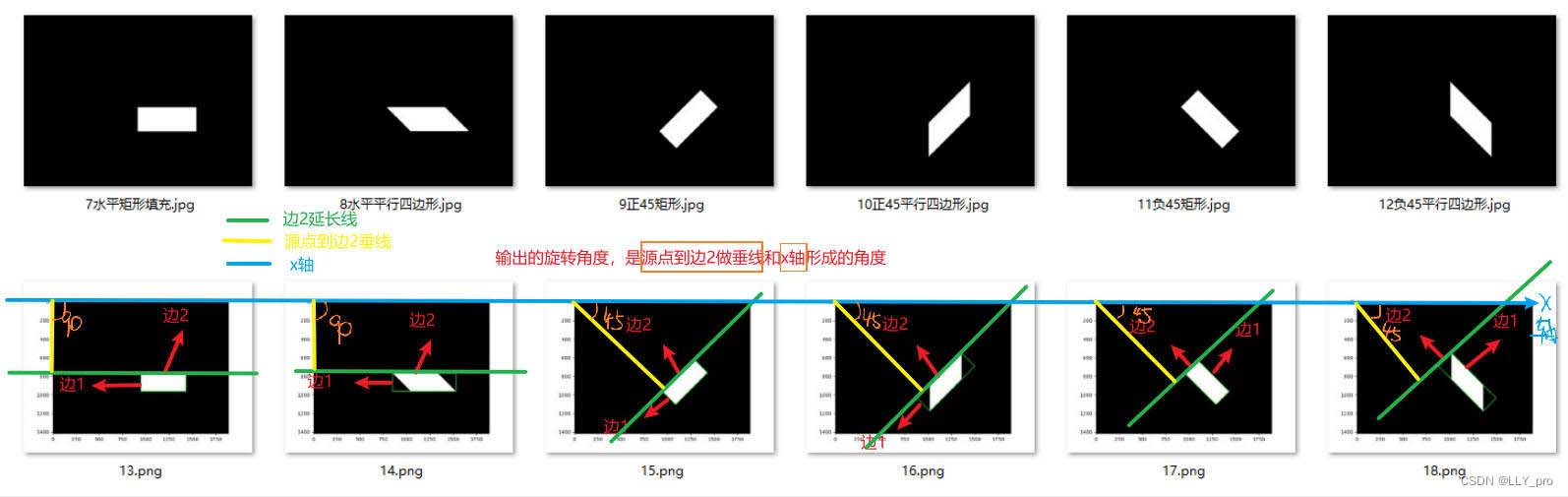
可以看到,输出的旋转角度和矩形边2的选择有关,具体函数是按照什么规则来确定边1和边2,我还不清楚,但是根据上面的实验结论,大致可以推测出以下规律:
参考目录
https://theailearner.com/tag/cv2-minarearect/

