rostopic pub -1 /swivel/swiveljoint1_position_controller/command std_msgs/Float64 "data: 1.5"
发布得消息类型是 std_msgs/Float64
这个应该发布得topic得名称 /swivel/swiveljoint1_position_controller/command
实验一下
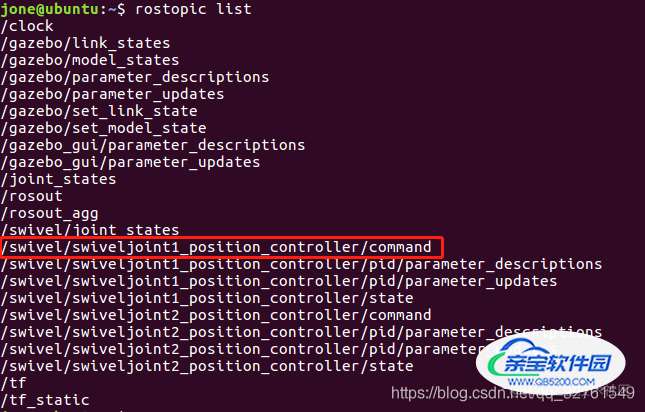
通过启动后查看活跃得topic 发现了此topic 但是现在有发布得地方,应该是有订阅的地方所以此时该topic 活跃
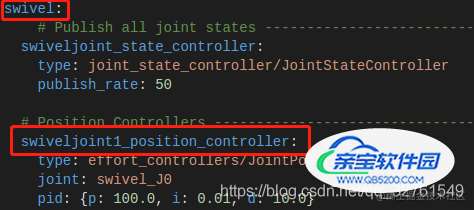
是对应得
$ catkin_create_pkg swivel_controller_cmd_publisher roscpp std_msgs
依赖 std_msgs 因为需要发布std_msgs/Float64 类型得数据
#include <ros/ros.h>
#include "std_msgs/Float64.h" //要发布该类型得数据 需要包含该类型文件
int main(int argc, char **argv)
{
ros::init(argc,argv,"swivel_gimbal_controller_cmd_publisher");
ros::NodeHandle nh ; //实例化句柄,初始化node
std_msgs::Float64 msg; //创建该类型消息
msg.data = 0.1; // 初始化消息
// 声明发布句柄 <std_msgs::Float64> 消息类型
// "/swivel/swiveljoint1_position_controller/command" 模板名称
// 数据缓存大小
ros::Publisher pub = nh.advertise<std_msgs::Float64>( "/swivel/swiveljoint1_position_controller/command", 1);
ros::Rate loop_rate(10);//定义发布的频率,1HZ
while (ros::ok())
{
msg.data = (msg.data)+0.1;
pub.publish(msg); //发布消息
loop_rate.sleep();//根据前面的定义的loop_rate
}
return 0;
}
其中 swivel_gimbal_controller_cmd_publisher 是节点名字
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_executable(swivel_gimbal_controller_cmd_publisher src/swivel_controller_cmd_publisher.cpp ) #生成可执行文件 swivel_gimbal_controller_cmd_publisher 节点的名字
add_dependencies(swivel_gimbal_controller_cmd_publisher mastering_ros_demo_pkg_generate_messages_cpp) #必须添加add_dependencies,否则找不到自定义的msg产生的头文件
target_link_libraries(swivel_gimbal_controller_cmd_publisher ${catkin_LIBRARIES})
roscore
rosrun swivel_controller_cmd_publisher swivel_gimbal_controller_cmd_publisher
rostopic echo /swivel/swiveljoint1_position_controller/command
数值按代码进行自增0.1变化
结果: 按之前方式启动整个系统
在启动发布消息得节点
云台转动了
但是会在敲下回车后延时1-2秒,延时 rostopic echo 也没有信息打印说明还没发布 可能是节点启动得延时 ,并不是执行器延时
实验成功!

